Introdução à Instrumentação e Automação Industrial
Instrumentação e Automação Industrial
1 Conceitos Básicos de Sistemas Dinâmicos e Controle
O Conceito de Sistema
“Uma agregação ou montagem de coisas de tal forma combinada pela natureza ou pelo homem que forma um todo integral ou complexo.” [Enciclopédia Americana]
“Um grupo de coisas interatuantes e interdependentes que formam um todo unficado.” [Dicionário Webster's]
“Uma combinação de componentes que agem conjuntamente para completar uma função não possível para quaisquer das partes individuais.” [Dicionário Padrão da
IEEE de Termos Elétricos e Eletrônicos]
O processo de Modelagem de Entrada e Saída
● Modelo de um Sistema
● Um dispositivo que simplesmente duplica o comportamento do sistema propriamente dito.
● Processo de Modelagem
● Começa por definir um conjunto de variáveis mensuráveis associadas ao sistema.
● Definidas por funções temporais.
● O tempo é uma variável independente ● Variáveis de Entrada
● Subcojunto de variáveis que pode-se fazer variar ao longo do tempo.
● Variável de entrada: ui(t), 1 ≤ i ≤ m
● Entrada do sistema: u(t) = [u1(t) ... um(t)]T
● Variáveis de Saída
● Subconjunto de variáveis que podem-se medir diretamente enquanto se variam as variáveis de entrada.
● Variável de saída: yj(t), 1 ≤ j ≤ n
● Saída do sistema: y(t) = [y1(t) ... yn(t)]T
● Modelagem (matemática)
● Definição de funções que relacionem entradas e
saídas do sistema.
Conceitos relacionados:
● Sistemas estáticos e dinâmicos
● Sistemas variantes no tempo e invariantes no tempo
O Conceito de Estado
● Estado de um sistema
● O estado de um sistema no tempo t0 é a informação requerida em t0 tal que a saída y(t), para todo t ≥ t0, é unicamente determinada a partir desta informação e da entrada u(t), para t ≥ t0. ● Variáveis de Estado
● Subconjunto das variáveis associadas ao sistema que definem seu estado.
● Variável de Estado: xk(t), 1 ≤ k ≤ p
● Estado do Sistema: x(t) = [x1(t) ... xp(t)]T ● Espaço de estados do sistema
● Conjunto de valores que o estado do sistema pode atingir.
O Processo de Modelagem por Espaço de Estados
● Equações de Estado
● Equações requeridas para especificar o estado do sistema x(t) para t ≥ t0, dados x(t0) e a função u(t) para t ≥ t0.
● Equações de Saída
● Conceitos Relacionados
● Sistemas Lineares e Não Lineares
● Sistemas lineares e invariantes no tempo
● Sistemas a tempo contínuo e sistemas a tempo discreto (sistemas amostrados/discretizados)
● Sistemas Determinstas e Aleatórios
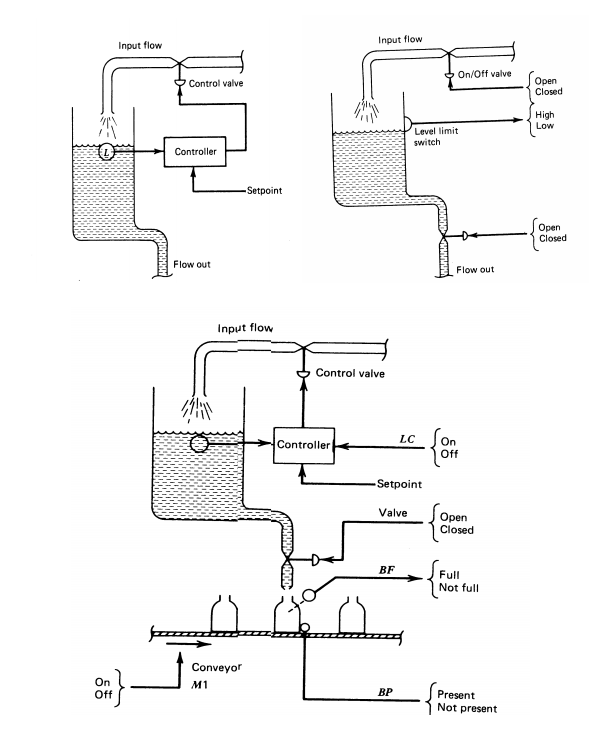
O Conceito de Controle
● O sistema destina-se a cumprir a uma determinada função
● Controlador
● Aplica uma entrada ao sistema para que este cumpra a sua função. ● Sinal de controle
● Saída do controlador, que é aplicada como entrada ao sistema.
● Sinal de referência
● Entrada do controlador, que diz respeito à alguma saída do sistema.
● Sistema em malha aberta.
O Conceito de Realimentação
● Realimentação
● Uso de qualquer informação disponível do comportamento do sistema para continuamente ajustar a entrada de controle.
● Sistema em malha fechada.
Instrumentação para Controle
● Necessária para implementação do controlador de um sistema.
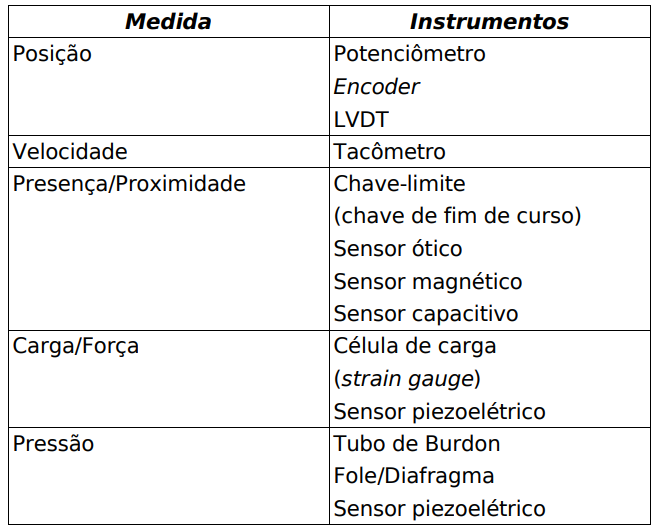
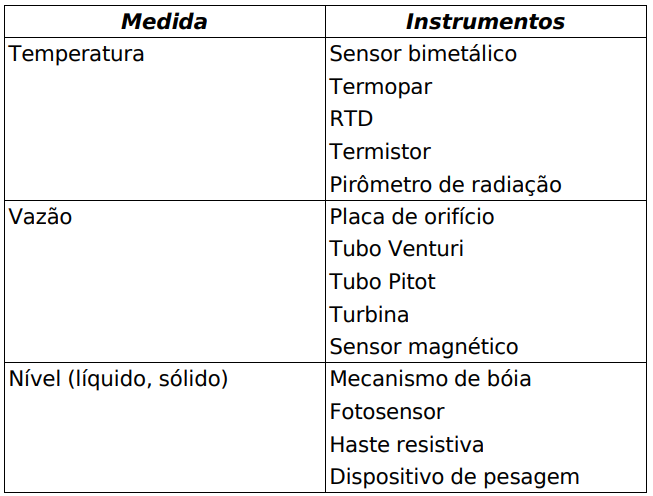
● Sensores
● Instrumentos primários
● Transmissores
● Registradores
● Instrumentos Primários
● Atuadores
● Motores com transmissão
● Válvulas
● Bombas
● Aquecedores
● Relés, disjuntores e contatoras
● Diferentes princípios de funcionamento
● Pneumático s
● Hidráulicos
● Elétricos
● Simbologia padronizada para instrumentação
● Norma ISA e ABNT
● Diagramas P&I
Controle Discreto
● Presente em quase todos os ambientes onde há automação
● Sistemas de Estado Contínuo e Sistemas a Estado Discreto X = R ou X = Q versus
X = {parado, trabalhando, quebrado}
● Sistemas Dirigidos pelo Tempo e Sistemas Dirigidos a Eventos
x(t) = A.e^b.t versus
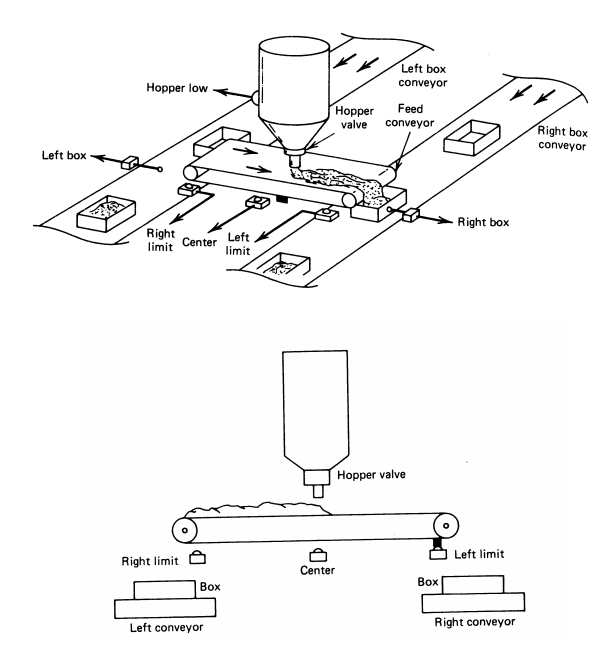
“Se caixa detectada à esquerda, parar a esteira da esquerda, ligar válvula do silo e ligar esteira central para a direita”.
● Sistemas Dinâmicos com Variáveis Contínuas
● As variáveis são funções contínuas do tempo
● A evolução do sistema é puramente regida pelo tempo
● Modelos matemáticos são equações diferenciais ou a diferenças
● Controle clássico (em tempo contínuo ou tempo discreto)
● Sistemas a Eventos Discretos
● Variáveis assumem valores discretos
● Evolução dirigida a eventos
● Modelos oriundos da ciência da computação
● Linguagens formais
● Autômatos
● Redes de Petri
● Lógica Temporal
● Lógica Max-Plus
● Controle discreto
Tecnologias Utilizadas na Automação
● Controlador Lógico Programável (CLP)
● Cavalo de Batalha
● Sistemas Supervisórios
● Redes Industriais
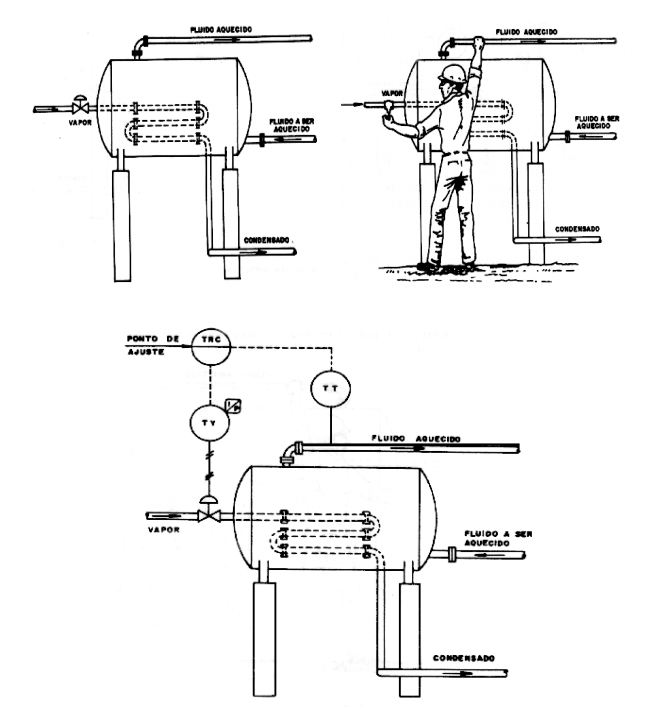
Exemplo - Trocador de Calor
Exemplo - Alimentador de Forno de Padaria
Exemplo - Sistema de Controle de Nível