Motores Elétricos
Enrolamento de Motor
1 Motores Elétricos
CLASSIFICAÇÃO
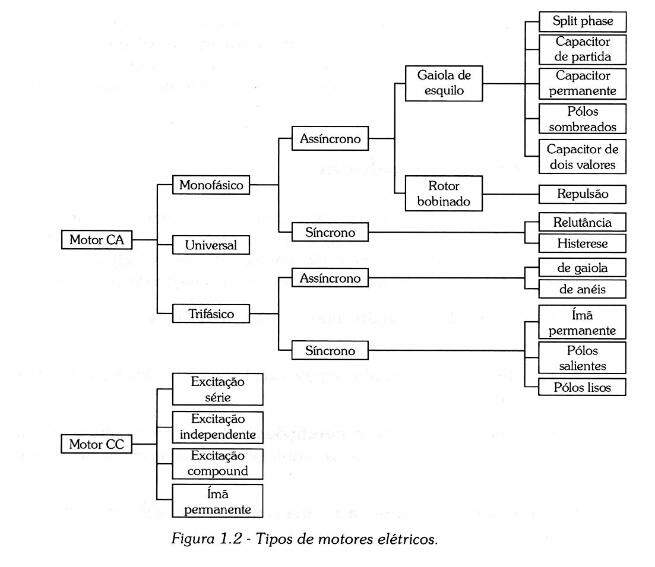
Classificação dos motores de indução de acordo com seu rotor
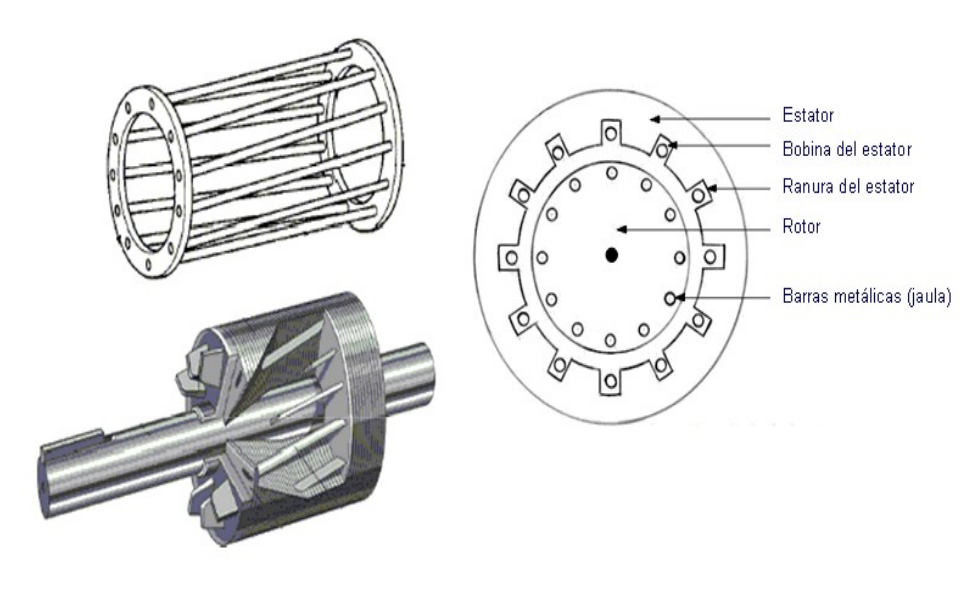
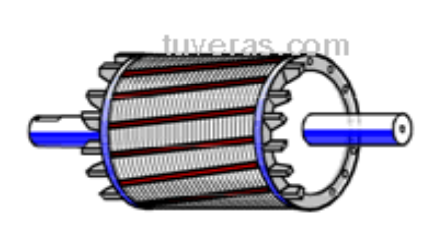
1) Rotor gaiola de esquilo
- O rotor em gaiola de esquilo é constituído por um núcleo de chapas ferromagnéticas, isoladas entre si, sobre o qual são colocadas barras de alumínio (condutores), dispostas paralelamente entre si e unidas nas suas extremidades por dois anéis condutores, também em alumínio, que provocam curto-circuito nos condutores.
Rotor Gaiola de Esquilo
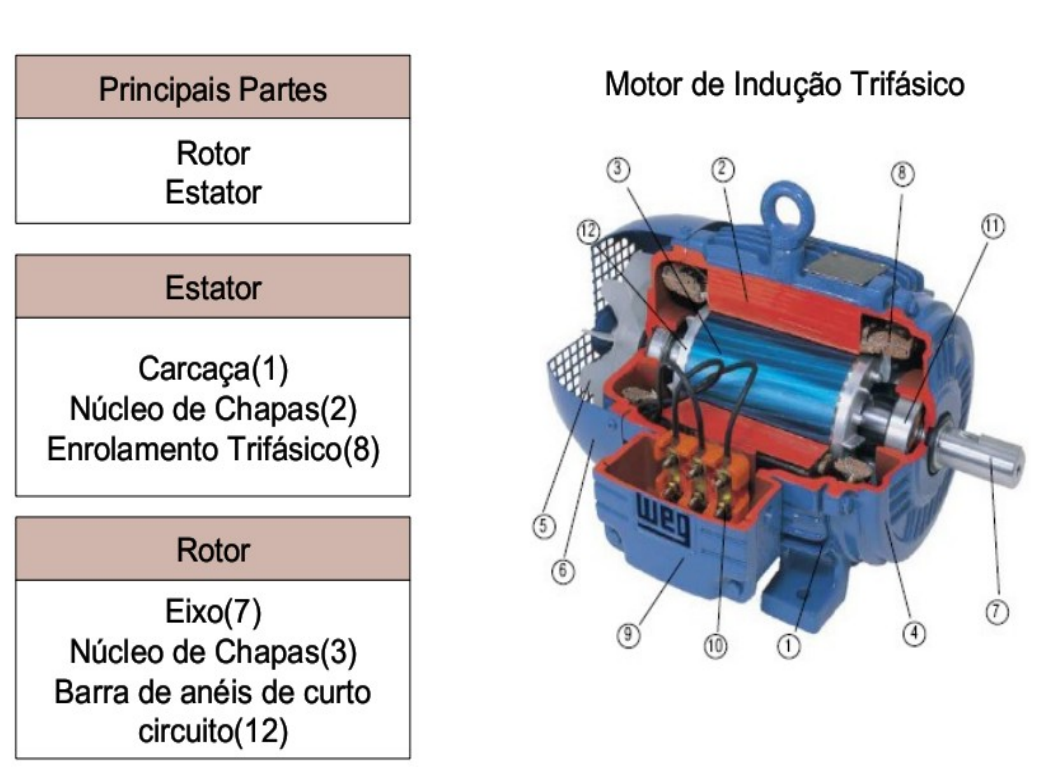
Estator
- O estator do motor é também constituído por um núcleo ferromagnético laminado, nas cavas do qual são colocados os enrolamentos alimentados pela rede de CA 3Φ
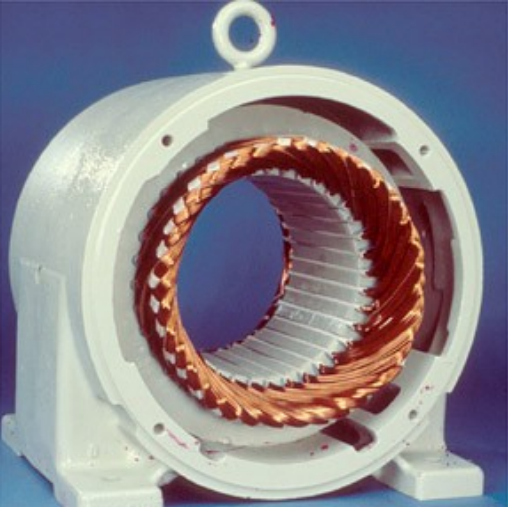
- As barras condutoras da gaiola são colocadas geralmente com uma certa inclinação para evitar as trepidações e ruídos pela ação eletromagnética entre os dentes das cavas do estator e do rotor.
Classificação dos motores de indução de acordo com seu rotor
1) Motor com rotor gaiola de esquilo
- Mais robusto;
- Em sua forma mais simples apresenta conjugado de partida relativamente fraco e corrente de partida até 10x da IN ;
- Para melhorar seu desempenho são equipados com rotores gaiola de barras altas, barras de cunha ou barras duplas.
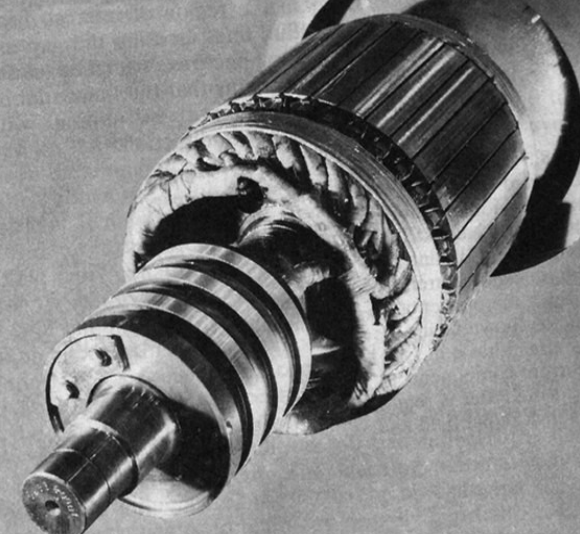
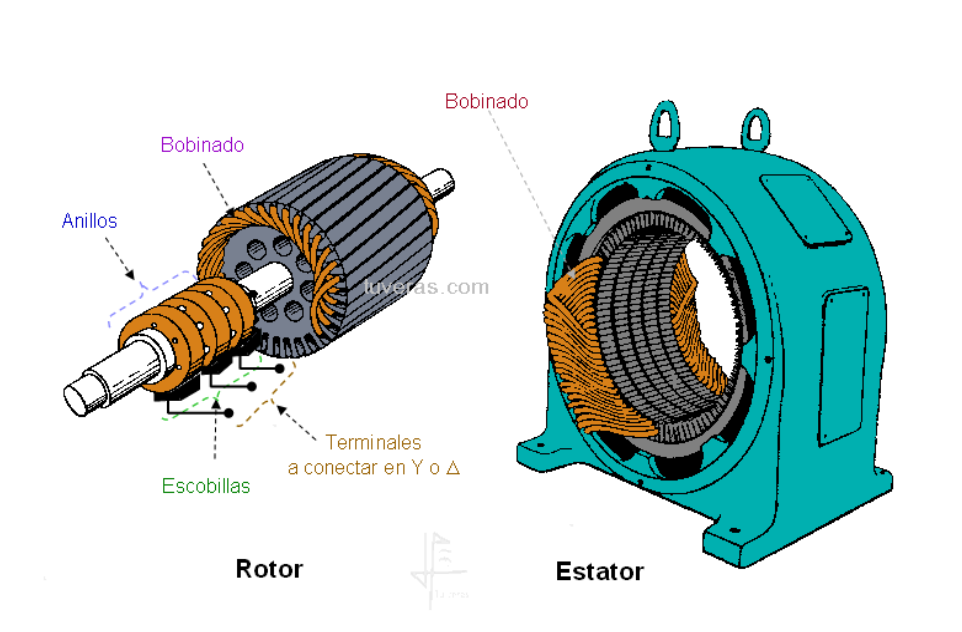
2) Motor com rotor bobinado
- Difere do motor de rotor em gaiola apenas quanto ao rotor, constituído por um núcleo ferromagnético laminado sobre o qual são alojadas as espiras que constituem o enrolamento 3Ø;
- A utilização de reostatos podem melhorar o conjugado de partida e diminuir o pico de corrente de partida.
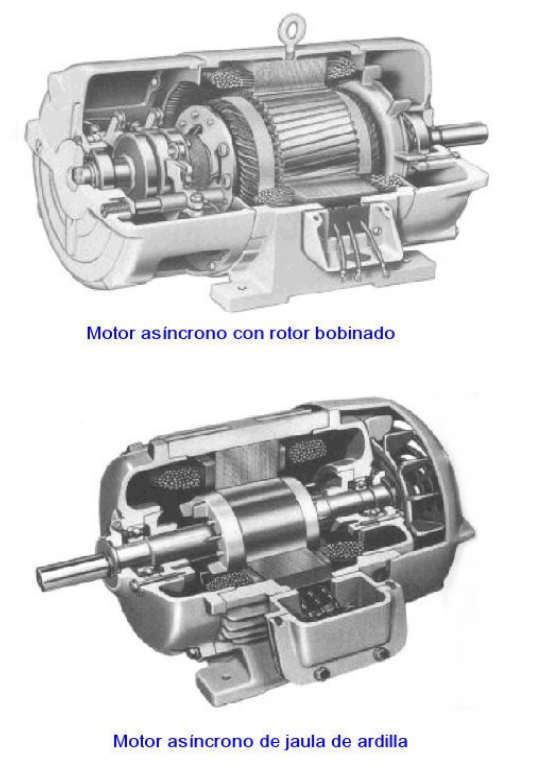
2 Rotor em gaiola X Rotor Bobinado
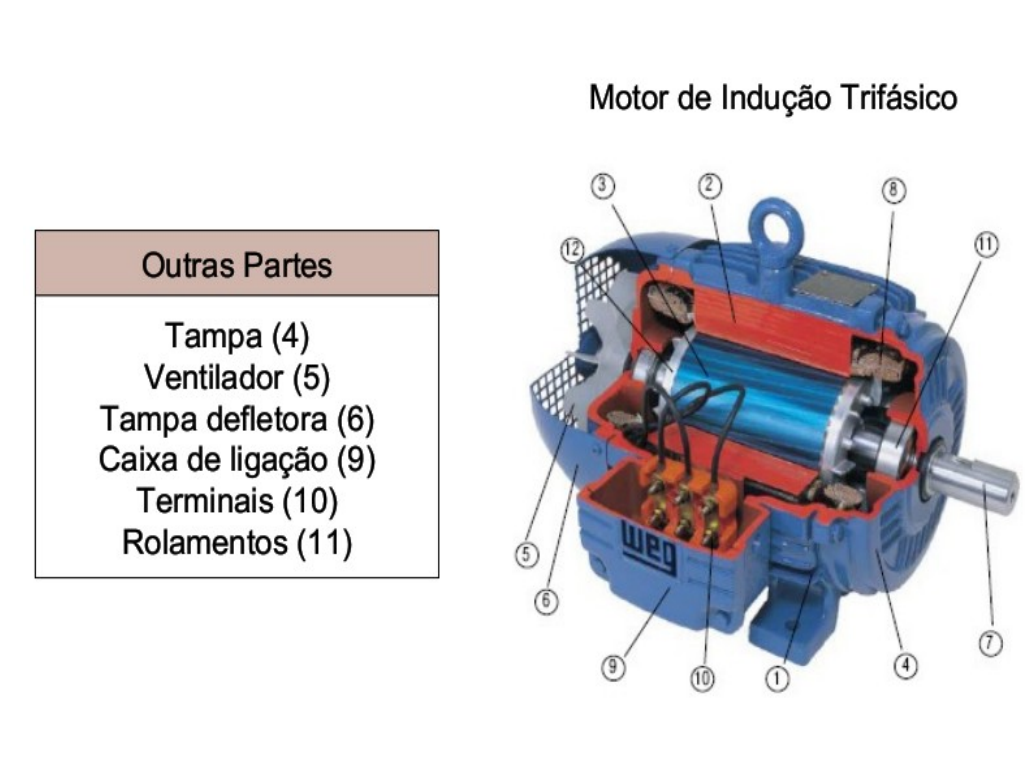
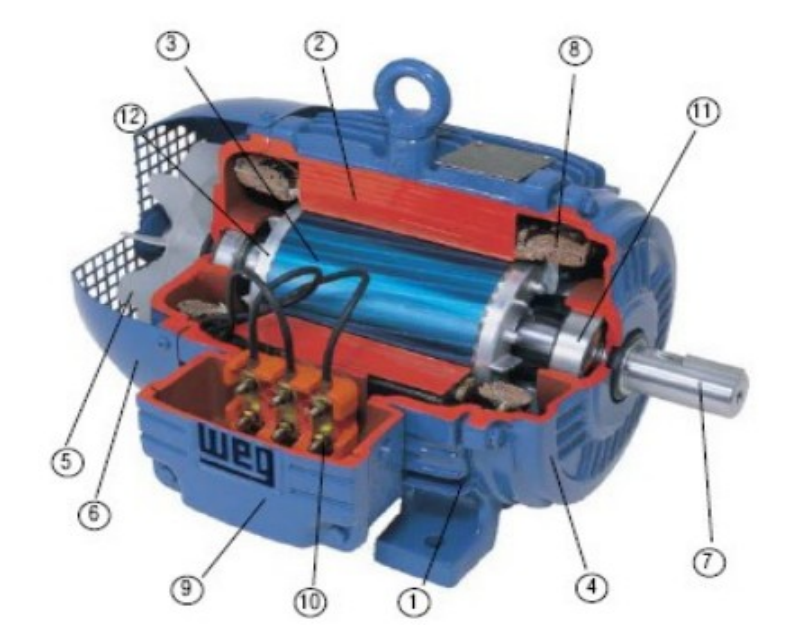
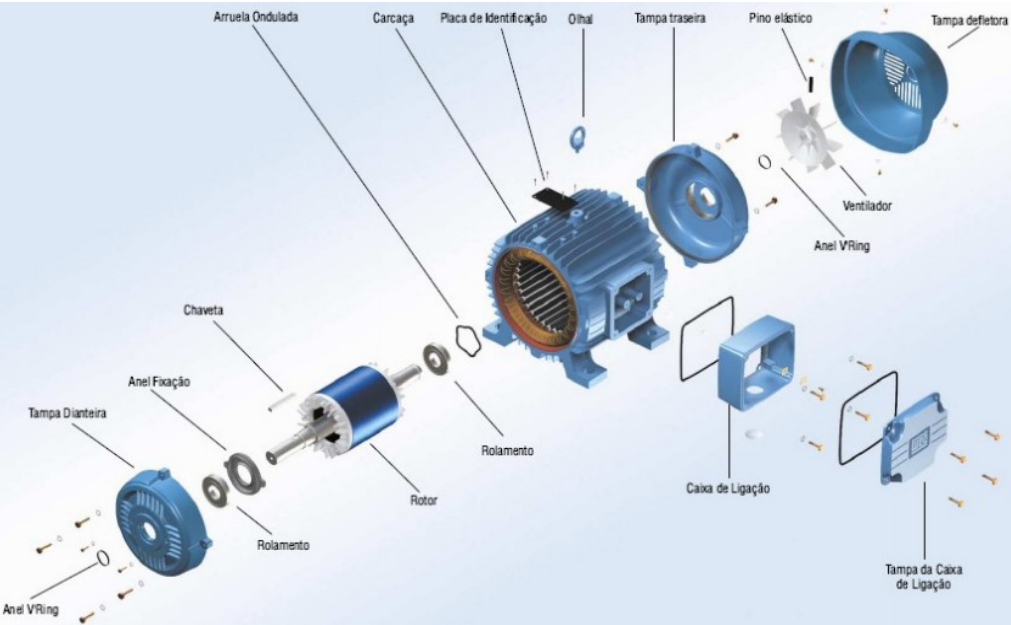
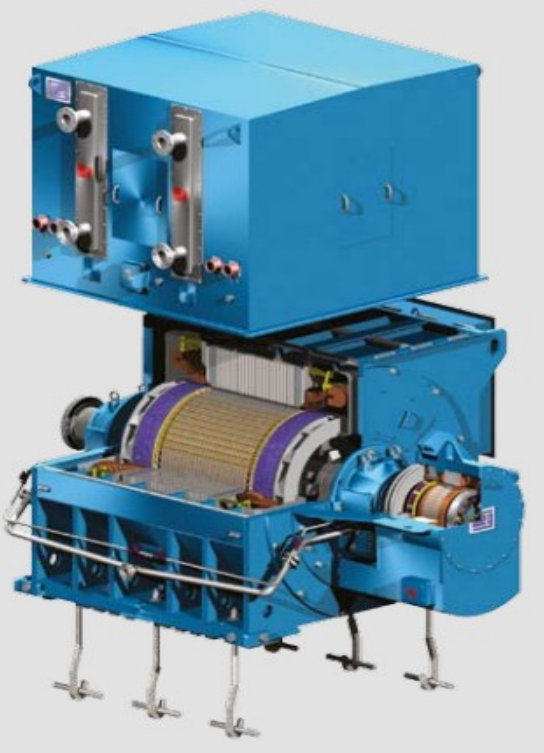
Constituição do motor de indução
Motores de indução monofásicos
Inconvenientes:
- Custo mais elevado que um motor 3Ø de mesma potência;
- Alcança apenas 60 a 70% da potência do motor 3Ø do mesmo tamanho;
- Apresenta rendimento e FP menores;
- Não é possível inverter diretamente o sentido de rotação de motores monofásicos.
- Destinado apenas a um valor de tensão;
- Não é possível a inversão do seu sentido de rotação;
- Exemplo: motores de pequenas bombas d´água, motores de ventilares grandes para o meio rural, etc.
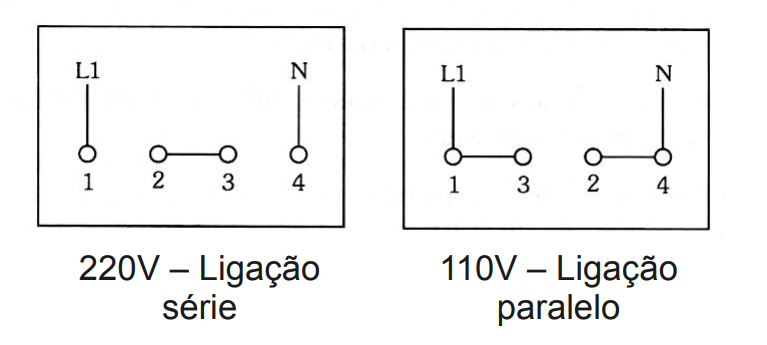
Motor monofásico com quatro terminais
- Dois valores de tensão (110/220V);
- Não é possível inverter o sentido de rotação desse motor.
Esquemas:
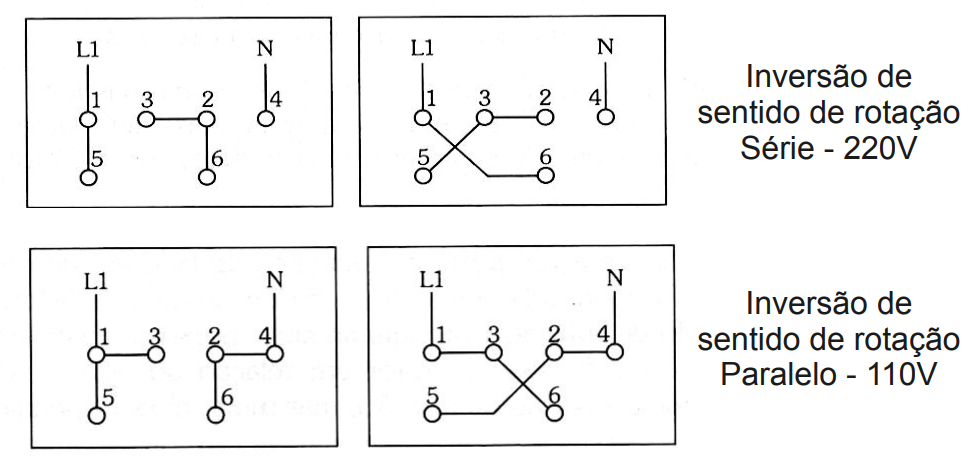
Motor monofásico com seis terminais
- Permite dois tipos de alimentação diferentes;
- Pode-se inverter o sentido de giro desse motor.
Esquemas:
- Motor de pólos sombreados (Shaded pole);
- Motor de fase dividida (Split phase);
- Motor de capacitor de partida (capitor start);
- Motor de capacitor permanente (permanent split capacitor);
- Motor com dois capacitores (two value capacitor).
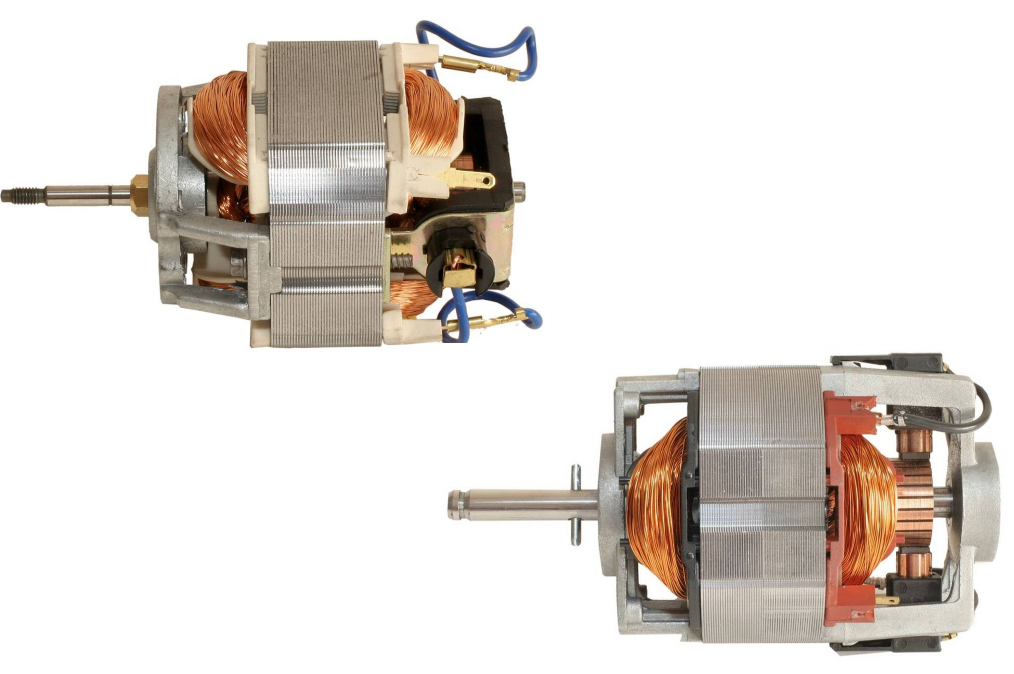
Motor Universal
- Pode operar tanto em CA como CC;
- Velocidade variável (baixas velocidades para grandes conjugados e altas velocidades para pequenas cargas);
- O conjugado de partida também é elevado;
- São usados comumente em pequenos eletrodomésticos como furadeiras e lixadeiras que requerem conjugado elevado e liquidificadores, aspiradores de pó e bombas centrífugas que requerem alta velocidade;
- Normalmente são fabricados para potências fracionárias de até ¾ cv uma vez que para potências acima de alguns cv funcionam precariamente em CA gerando grande faiscamento nas escovas e η e FP decrescem.
Identificação das bobinas de um motor monofásico
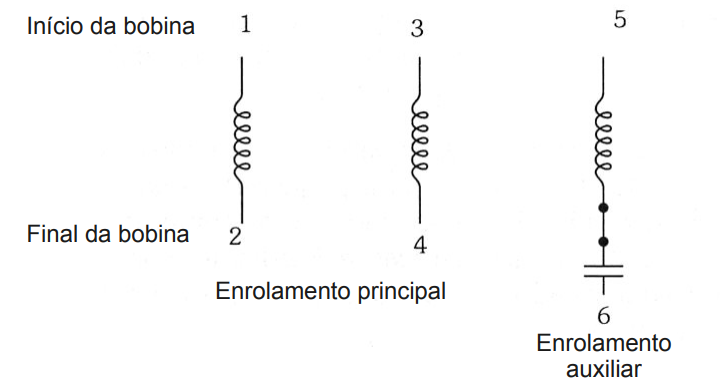
Para determinar os enrolamentos principais e auxiliar:
- Com ohmímetro mede-se a R de cada bobina. A que apresentar maior valor é a auxiliar
Polarização das bobinas principais
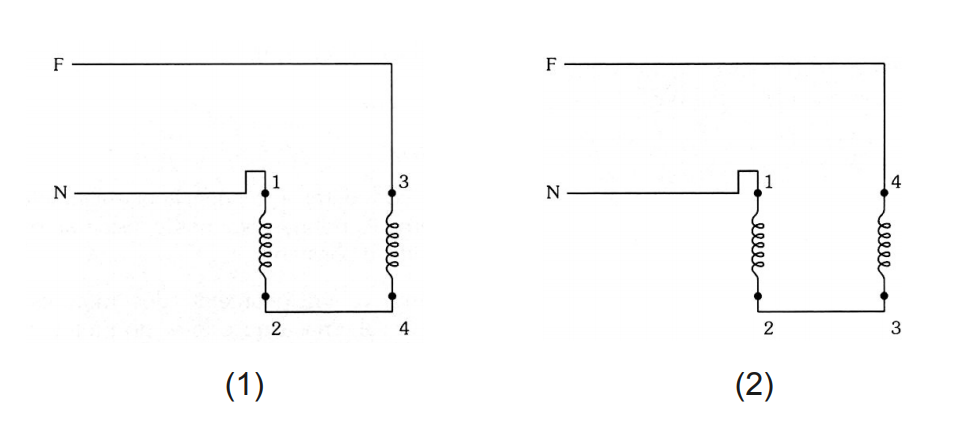
Após inverter uma das bobinas e medir a corrente novamente, deve-se aplicar os números 1, 2, 3 e 4, respectivamente, à ligação das bobinas que apresentar a menor corrente.
3 Motores Síncronos
A velocidade do seu rotor é sincronizada com o campo girante que é estabelecido no estator.
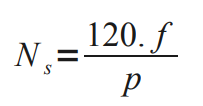
Sendo: Ns = velocidade síncrona em rpm;
f = frequencia em Hz;
p = número de pólos.
Como f e p são constantes, então Ns é constante.
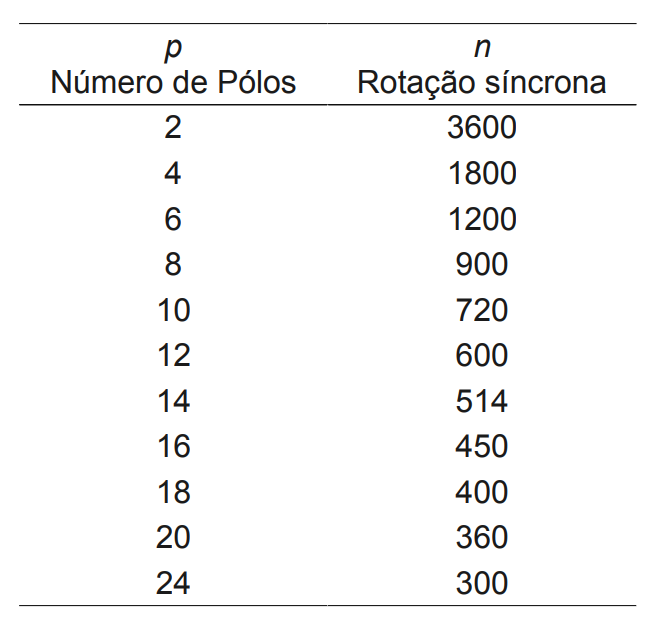
Rotação síncrona em função do número de pólos, para a frequência de 60 Hz
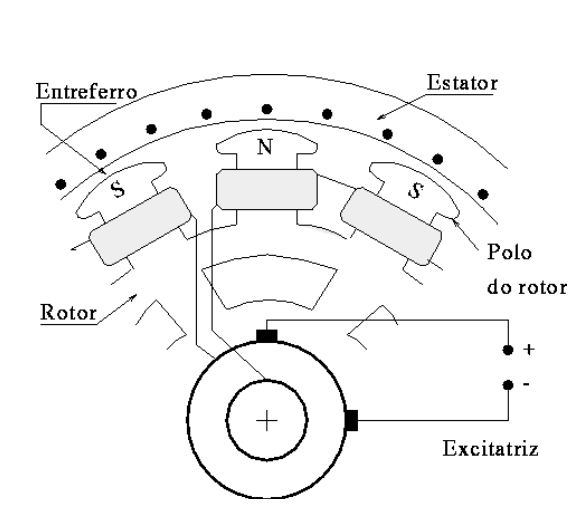
Nestes motores, o estator é alimentado com CA, enquanto o rotor o é com CC proveniente de uma excitatriz (dínamo).
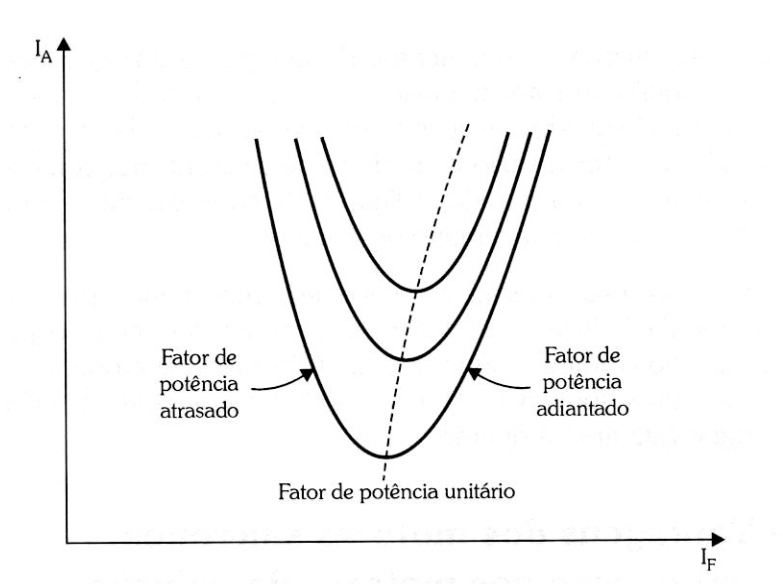
Utilização do motor síncrono para correção do FP
- Devido à possibilidade de variação da excitação do campo, o motor síncrono possui a característica de variação do FP;
- O FP é diretamente dependente da corrente de excitação
Variação do FP em função da variação da corrente de excitação
Desvantagens dos motores síncronos em relação aos de indução
- Precisam de uma fonte de excitação em CC;
- Manutenção constante;
- Não parte apenas com CA no estator pois é necessário que o motor seja levado e uma velocidade suficiente, próxima da velocidade síncrona para que ele possa entrar em sincronismo com o campo girante.
Vantagens dos motores síncronos em relação aos motores de indução
- Podem corrigir o FP;
- Possuem η maiores do que os motores de indução equivalentes, quando trabalham com FP = 1.
4 Motores Assíncronos
- Giram numa rotação menor do que a rotação síncrona;
- Nestes motores, ocorre um deslizamento ou defasagem em relação à rotação síncrona, pois eles funcionam a uma velocidade menor que a síncrona.
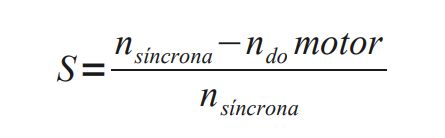
Deslizamento ou escorregamento (S):
Características
- A velocidade a plena carga pode ser de 5 a 10% menor que o valor da velocidade com o motor sem carga;
- Os motores em gaiola absorvem, na partida, uma corrente que pode chegar de 5 a 7x a corrente a plena carga, mas desenvolvem um conjugado motor cerca de 1,5x o de plena carga, o que é muito conveniente para a demarragem das máquinas por eles acionadas.