A HISTÓRIA DAS MAQUINAS DE COSTURA
Mecânica de Máquinas de Costura Industrial
1 Automação:
Em um contexto industrial, pode se definir automação como a tecnologia que se ocupa da utilização de sistemas mecânicos, eletroeletrônicos e computacionais na operação e controle da produção. Diversos exemplos de automação de sistemas de produção podem ser observados nas linhas de produção industrial, nas máquinas de montagem mecanizadas, nos sistemas de controle de produção industrial realimentados, nas máquinas-ferramentas dotadas de comandos numéricos e nos robôs de uso industrial.
Automação x mecanização:
Automação é diferente de mecanização. A mecanização consiste simplesmente no uso de máquinas para realizar um trabalho, substituindo o esforço físico do homem. Já a automação possibilita fazer um trabalho por meio de máquinas controladas automaticamente, capazes de se autorregularem.
Desenvolvimento da automação:
As primeiras iniciativas do homem para mecanizar atividades manuais ocorreram na pré-história. Invenções como a roda, o moinho movido por vento ou força animal e as rodas d’água demonstram a criatividade do homem para poupar esforço. Porém, a automação só ganhou destaque na sociedade quando o sistema de produção agrário e artesanal transformou-se em industrial, a partir da segunda metade do século XVIII, inicialmente na Inglaterra. Os sistemas inteiramente automáticos surgiram no início do século XX. Entretanto, bem antes disso foram inventados dispositivos simples e semi-automáticos. Por volta de 1788, James Watt desenvolveu um mecanismo de regulagem do fluxo de vapor em máquinas. Isto pode ser considerado um dos primeiros sistemas de controle com realimentação. O regulador consistia num eixo vertical com dois braços próximos ao topo, tendo em cada extremidade uma bola pesada. Com isso, a máquina funcionava de modo a se regular sozinha, automaticamente, por meio de um equilíbrio de forças.
A partir de 1870, também a energia elétrica passou a ser utilizada e a estimular indústrias como a do aço, a química e a de máquinas-ferramenta. No século XX, a tecnologia da automação passou a contar com computadores, servomecanismos e controladores programáveis. Os computadores são os alicerces de toda a tecnologia da automação contemporânea. Encontramos exemplos de sua aplicação praticamente em todas as áreas do conhecimento e da atividade humana.
Classificação dos sistemas automatizados:
A automação pode ser classificada de acordo com suas diversas áreas de aplicação. Por exemplo: automação bancária, comercial, industrial, agrícola, de comunicações, de transportes. A automação industrial pode ser desdobrada em automação de planejamento, de projeto, de produção.
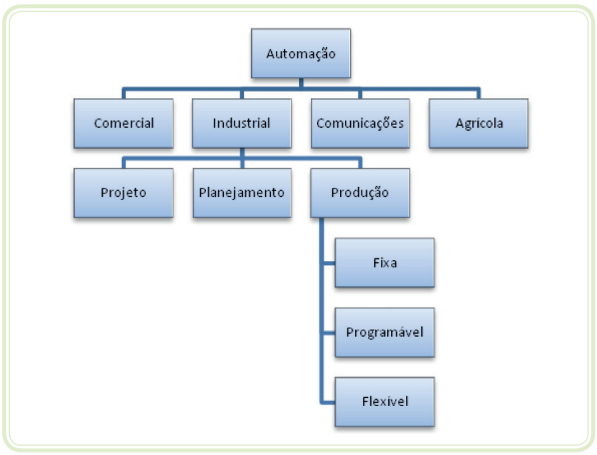
Podemos então perceber que no universo dos sistemas automatizados, o nosso interesse recai especialmente no Sistemas Industriais de Produção Automatizados. Esses sistemas pode ainda ser classificados quanto ao seu nível de flexibilidade:
- Automação fixa.
- Automação programável.
- Automação flexível.
Automação fixa:
Está baseada em uma linha de produção especialmente projetada para a fabricação de um produto específico e determinado. É utilizada quando o volume de produção dever ser muito elevado, e o equipamento é projetado adequadamente para produzir altas quantidades de um único produto ou uma única peça de forma rápida e eficiente, isto é, para ter uma alta taxa de produção. Como exemplo de indústrias onde a automação fixa é muito utilizada, podemos citar a produção de componentes mecânicos simples como arruelas e parafusos. O equipamento é, em geral, de custo elevado, porém devido a sua alta taxa de produção, o custo fixo é dividido numa grande quantidade de unidades fabricadas.
O risco que se enfrenta com a automação fixa é que qualquer alteração nas vendas ou alteração do produto poderá tornar a linha obsoleta, trazendo um grande prejuízo.
Automação programável:
É baseada em um equipamento com capacidade de fabricar uma variedade de produtos com características diferentes, segundo um programa de instruções previamente introduzido. Esse tipo de automação é utilizado quando o volume de produção de cada item é baixo. O equipamento de produção é projetado para ser adaptável às diferentes características e configurações dos produtos fabricados. Essa adaptabilidade é conseguida mediante a operação do equipamento sob controle de um programa de instruções preparado para o produto em questão.
Esse programa pode ser introduzido no sistema através de um teclado, por cartões de memória ou mesmo através da integração em redes de chão de fábrica. Um sistema típico de automação programável são as máquinas de usinagem com controle Código Numérico Computadorizado (CNC). A operação do equipamento sempre dependerá das instruções indicadas por esse programa de controle. Em termos de economia, o custo do equipamento pode ser diluído num grande número de produtos, mesmo que estes tenham diferentes configurações.
Automação flexível:
Pode ser entendida como uma solução de compromisso entre a automação fixa e a automação programável. A automação flexível também é conhecida como sistema de Manufatura Integrada por Computador (CIM) e, em geral, parece ser mais indicado para o volume médio de produção. Os sistemas de produção baseados na automação flexível têm algumas das características da automação fixa e outras da automação programável. O equipamento deve ser programado para produzir uma variedade de produtos com algumas características ou configurações diferentes, mas a variedade dessas características é normalmente mais limitada que aquela permitida pela automação programável.
Assim, por exemplo, um sistema de manufatura flexível pode ser projetado para produzir uma única peça, mas com diferentes dimensões, ou diferentes materiais. Os sistemas flexíveis automatizados consistem, em geral, de estações de trabalho autônomas com um alto grau de integração. Essas estações estão interligadas por um sistema de manuseio, transporte e armazenamento do material. Um computador central é utilizado para controlar e monitora as diversas atividades que ocorrem no sistema, determinando a rota das diversas partes para as estações apropriadas controlando as operações previamente programadas nas diferentes estações.
Uma das características que distinguem a automação programável da automação flexível é que nos sistemas que utilizam a primeira os produtos são fabricados em lotes, enquanto na fabricação flexíveis diferentes produtos podem ser fabricados ao mesmo tempo no mesmo sistema, bastando programar o computador central para desviar as diferentes peças e materiais para as estações de trabalho adequadas. Portanto, a potência computacional do controlador é o que torna essa versatilidade possível.
O impacto da automação na sociedade:
O processo de automação em diversos setores da atividade humana trouxe uma série de benefícios à sociedade. A automação geralmente reduz custos e aumenta a produtividade do trabalho. A automação pode livrar os trabalhadores de atividades monótonas, repetitivas ou mesmo perigosas. Apesar dos benefícios, o aumento da automação vem causando também alguns problemas para os trabalhadores:
- Aumento do nível de desemprego, principalmente nas áreas em que atuam profissionais de baixo nível de qualificação.
- A experiência de um trabalhador se torna rapidamente obsoleta.
- Muitos empregos que eram importantes estão se extinguindo, como telefonistas, atualmente perfeitamente substituíveis por centrais de telefonia automáticas.
Esses impactos alteram o comportamento dos indivíduos no ambiente de trabalho, podendo aumentar as ausências, falta de coleguismo, alcoolismo ou consumo de drogas. De certa forma, esse processo de alienação deriva do sentimento de submissão do trabalhador à máquina e da falta de desafios. Esses problemas, no entanto, podem ser solucionados com programas contínuos de aprendizagem e reciclagem de trabalhadores para novas funções. Além disso, as indústrias de computadores, máquinas automatizadas e serviços vêm criando um número de empregos igual ou superior àqueles que foram eliminados no setor produtivo.
2 Robótica industrial:
Robótica:
A humanidade sempre mostrou certo fascínio, desde tempos pré-históricos, por seres extraordinários, homens mecânicos e outras criaturas que, em geral, nunca passaram de fantasia. A palavra robô tem a origem atribuída ao escritor tcheco Karel Capek, o qual utilizou em seus livros o termo tcheco robota (que significa trabalhador escravo). Esse termo, traduzido para o inglês tornou-se robot, e teve o seu uso popularizado pelo escritor Issac Asimov com seu livro “Eu, Robô”, de 1950, data em que pela primeira vez foi utilizado o termo robótica para denominar ciência que estuda os sistemas robóticos.
Este interesse gerou no passado vários sistemas que tentavam automatizar movimentos, mas que dificilmente passavam de sistemas mecânicos com programação fixa. Somente nas décadas de 1940 e 1950 surgiram tecnologias que permitiriam o advento do robô industrial moderno. Essas tecnologias foram o telecomando e o comando numérico. O telecomando, ou controle remoto, consistia em controlar um atuador a distância, através de conexões elétricas. Estes sistemas começaram seu desenvolvimento a partir da década de 1940, com o objetivo de realizar o manuseio a distância de materiais radioativos, e seguem sendo utilizados até os dias atuais. Podemos citar os sistemas de microcirurgia, em que o cirurgião opera os instrumentos remotamente, através de imagens de vídeo.
Outra tecnologia crucial para o desenvolvimento da robótica, o comando numérico, foi desenvolvido em seguida e consiste basicamente em sistemas que podem ser programados através de uma série de comandos que podem, por exemplo, representar a posição de uma ferramenta no espaço. A primeira patente de um dispositivo robótico foi feita por um britânico, Cyril W. Kenward, em 1954. Porém o conceito moderno de robô industrial foi criado por Joseph Engelberger, que, em conjunto com o americano George C. Devol, desenvolveu o primeiro protótipo comercial chamado Unimate. A primeira instalação industrial foi realizada pela Ford Motor Company, que utilizou um modelo Unimate para realizar o descarregamento robotizado de uma máquina de fundição sob pressão.

Em 1974 a mesma empresa que criou o Unimate, lançou um novo robô de 6 eixos chamado PUMA, o qual foi responsável pela popularização deste tipo de equipamento. Ainda existem muitos desses modelos em atividade até os dias de hoje. PUMA são as iniciais de Programmable Universal Machine for Assembly, ou seja, máquina universal programável para montagem.
Os conceitos básicos dos robôs industriais modernos permanecem praticamente os mesmos, havendo, porém um grande desenvolvimento dos seus sistemas de controle, principalmente devido ao desenvolvimento dos sistemas computadorizados. Essa evolução permitiu um grande salto na velocidade de trabalho e principalmente na complexidade das tarefas realizadas pelos robôs industriais. Os sistemas de controle dos robôs normalmente estão localizados externamente à parte mecânica do mesmo, normalmente em um gabinete metálico, o qual chamamos controlador. Esse gabinete normalmente é conectado por cabos ao atuador, podendo portanto localizar-se a uma distância segura da área de trabalho. Para completar o sistema ainda temos que contar com uma fonte de alimentação de alta potência para o acionamento dos eixos (normalmente localizada no mesmo gabinete do controlador) e da interface de programação do robô.
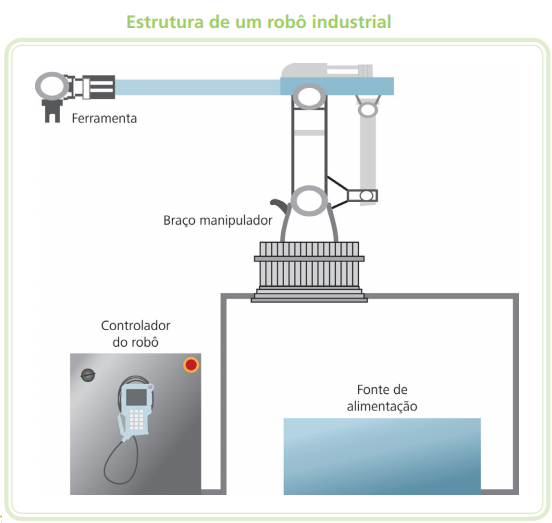
Controlador do robô:
É interessante que ao imaginarmos um robô industrial, pensamos logo no braço manipulador. Esse elemento é obviamente o mais importante do conjunto, pois é o responsável por realizar o trabalho útil na linha de produção. Porém, um robô industrial depende inteiramente de outro elemento, o controlador. O controlador do robô é um sistema eletrônico que faz todo o processamento de dados, gera os comandos e alimenta os elementos do robô industrial. Normalmente é composto por um gabinete metálico dentro do qual estão:
- Unidade lógica de comando – a maioria dos robôs industriais atuais utiliza um microcomputador PC como unidade de comando. Esta unidade roda o programa de comando que controla os eixos, processa os programas do usuário e controla as interfaces de comunicação do robô.
- Interface de programação – são as interafaces que possibilitam a interação entre o operador e o robô, permitindo acompanhar o trabalho, realizar a programação e o diagnóstico de problemas.
- Interfaces lógicas – normalmente os robôs apresentam uma placa de entrada/ saída digital que permite a sua integração com outros elementos do sistema, como controlar a abertura e fechamentos dos efetuadores (garras, ventosas pneumáticas, ...).
- Sistema de potência – os robôs normalmente são movimentados utilizando-se servomotores elétricos. Esses elementos necessitam de altas correntes de acionamento, as quais são controladas por circuitos eletrônicos de potência que chamamos “drivers dos eixos”.
- O transformador de alimentação – gera a tensão necessária para alimentar todos os elementos.
Unidade de programação “Teach Pendant”:
O controlador do robô apresenta uma interface que permite o seu controle bem como a inserção e análise dos programas. Como o controlador pode estar a vários metros do manipulador, essa interface normalmente é portátil, sendo chamada de Unidade de Programação, ou “Teach Pendant”.
A unidade de programação normalmente possui os seguintes elementos:
- Tela de texto ou gráfica – onde são apresentados os dados ao operador. Atualmente é comum encontrarmos telas gráficas coloridas com função de toque na tela (touch screen).
- Teclado – para realizar a entrada de dados.
- Botão direcional ou joystick – para movimentação manual do robô.
- Botão de emergência – realiza a parada imediata do robô.
Vantagens da utilização de robôs nas indústrias:
Existem muitas razões para a utilização de robôs na produção industrial e em outras aplicações. As mais significativas são:
Custo:
Apesar de um investimento inicial relativamente elevado, a longa vida útil de um robô moderno permite a amortização deste valor por um período bastante longo. Essa característica tem tornado o robô industrial um equipamento bastante acessível. Além disso, o melhor controle dos processos permite a utilização de material nas quantidades mínimas necessárias, especialmente em operações do tipo soldagem e pintura.
Melhoria da produtividade:
Os robôs podem trabalhar muito mais rapidamente do que um operador humano, além de trabalhar continuamente. Esta maior capacidade de produção reflete-se também na redução do espaço físico necessário para a operação da tarefa.
Melhora da qualidade do produto:
A qualidade melhora por vários motivos. Por exemplo um robô de soldagem pode posicionar a ferramenta de solda com muito mais precisão e manter velocidades de avanço mais constantes, refletindo diretamente na qualidade da solda. Robôs manipuladores conseguem repetir uma tarefa de posicionamento de peças e componentes, sem alterações de precisão, por longos períodos, algo impossível ou extremamente desgastante para um operador humano.
Capacidade de operar em ambientes hostis e com materiais perigosos:
Um dos primeiros usos dos robôs industriais foi a operação com metais em alta temperatura. Os operários, para realizar essas tarefas, precisam utilizar instrumentos e equipamentos de proteção pesados e de difícil manuseio; um robô, porém, pode operar sem maiores inconvenientes. Outra aplicação bastante comum são linhas de pintura, em que as tintas são altamente tóxicas, gerando condições de grande insalubridade aos trabalhadores. O mesmo ocorre com materiais radioativos, explosivos e combustíveis.
Melhora no gerenciamento da produção:
Essa é uma vantagem comum a todos os sistemas automatizados. Quando uma empresa de manufatura, totalmente operada por pessoas, deseja ter um efetivo monitoramento de sua produção não há outra solução além de mandar os operários anotarem os dados, o que obviamente é demorado, impreciso e impacta a produção. Em sistemas automatizados, além dos tempos de produção serem muito mais constantes, esse controle pode ser feito facilmente, pois as informações podem ser gravadas digitalmente e portanto avaliadas com facilidade.
3 AS MAQUINAS DE COSTURA:
A máquina de costura é um aparelho utilizado para unir ou prender partes de tecidos ou outros materiais flexíveis, por exemplo na fabricação de peças de vestuário ou de calçado. Basicamente, a máquina consiste num mecanismo que faz mover uma agulha na ponta da qual está enfiada em uma linha que é em cada movimento de passagem pelo tecido enrolada noutra linha colocada numa bobinaseparada. O movimento pode ser feito manualmente, por meio de um pedal ou por um motor eléctrico.
Existem muitas variantes da versão básica, algumas especializadas para certas funções, como por exemplo para cortar e chulear (chamadas também de "máquinas de cortar"), para pregar botões, e para uso doméstico ou em fábricas. As máquinas de costura foram inventadas durante a primeira Revolução industrial para diminuir a quantidade de trabalho manual costura realizado em empresas de roupas. Desde a invenção da primeira máquina de costura trabalhando, geralmente considerada como sendo obra do inglês Thomas Saint em 1790, a máquina de costura melhorou muito a eficiência e a produtividade da indústria da roupa.
A máquina de manivela:
Durante boa parte da vida da máquina de costura houve fabricação de máquinas de tamanho versátil montadas em uma base em madeira e que tinham propulsão manual através de uma manivela. Antecessora da máquina de pedal. Embora o conceito da máquina de costura existisse desde 1755, eram máquinas pesadas, caras e difíceis de operar. Apenas em 1830, quando o alfaiate francês Barthélemy Thimmonier resolveu aperfeiçoar a tecnologia já existente, é que as máquinas de costura se tornaram verdadeiramente práticas. Thimmonier chegou mesmo a montar uma fábrica de uniformes para o exército, que foi destruída em um incêndio. Graças a Thimmonier foi possível pensar as primeiras linhas de produção de roupas em escala industrial. A popularização da máquina de costura ajudou no processo de passagem de uma produção artesanal e personalizada de roupas para o modelo de produção industrial em série que temos hoje.