Sistema de Transmissão de Potência
Mecânica de Caminhões
1 Sistema de Transmissão de Potência
Introdução
Um dos equipamentos mais comuns utilizados na transmissão de potência são as correias. Estes componentes são vitais na maioria das máquinas modernas. Elas são, basicamente, um anel de material flexível que corre em torno de dois eixos. Um eixo gira e faz com que a correia se mova, girando outro eixo.
Assim, são elementos de máquinas que transmitem o movimento de rotação entre dois eixos através de polias ou engrenagens (no caso de correias dentadas). Costumam ser aplicadas quando a transmissão deve ser realizada entre dois eixos que possuem certa distância entre si.
Existem diversos tipos de correias para transmissão de movimento e potência, podendo elas ser planas, dentadas ou trapezoidais (ou em “V”).
As correias planas e trapezoidais são utilizadas em conjunto com polias que podem possuir sulcos (no caso das correias em “V”) ou não (no caso das planas). Estas são comumente utilizadas em compressores de ar condicionado, bombas d’água e motores automotivos. Redirecionando e transmitindo energia do virabrequim para outros componentes, por exemplo.
Já as correias dentadas, são utilizadas em conjunto com engrenagens para a transmissão de potência. Normalmente são fabricadas em borracha revestida em lona, possuindo em seu interior cordonéis vulcanizados responsáveis por suportar as forças de tração aplicadas.
As correias para transmissão de potência são utilizadas em motores, hélices, rotores ou misturadores. Também em qualquer tipo de equipamento que necessite este tipo de transmissão. Podem ser dentadas, trabalhando em conjunto com engrenagens, ou planas, trabalhando em conjunto com polias.
Pensando nos motores automotivos, por exemplo, as correias tem por função a sincronização do movimento do virabrequim com o comando de válvulas. Assim garantem o momento correto de abertura e fechamento das válvulas, conforme posição do pistão.
Resumidamente, no final do eixo virabrequim e do eixo comando de válvulas existe uma polia ou uma engrenagem. Através da utilização de uma correia dentada ou plana, o giro dos dois eixos é sincronizado. Fazendo com que o motor funcione da maneira correta, não havendo o risco dos pistões e das válvulas se chocarem.
O funcionamento em hélices, rotores, misturadores, bombas d’água, entre outros, é semelhante ao dos motores. A correia realiza a transmissão da potência de um motor elétrico através da polia para o próximo componente, que pode ser um rotor, um misturador, hélice, etc.
2 Principais componentes
2.1 Embreagem
Transmissões mecânicas são utilizadas entre a fonte de potência, o motor, e a carga, que é onde a energia gerada está sendo consumida. Nos casos mais simples, são redutores de velocidade de um estágio, que servem também para aumentar o torque disponível no motor, permitindo o uso de motores menores para o acionamento da carga. Nos casos mais complexos, as transmissões não têm apenas uma relação fixa de transmissão: possuem diversas combinações possíveis que permitem que a velocidade seja aumentada ou reduzida, dependendo da saída desejada. Algumas transmissões permitem que a alteração da relação de transmissão seja feita de forma gradual, como nas CVTs, discutidas em aula; outras não permitem a variação gradual.
O tipo mais comum de transmissão é por engrenagens, utilizada principalmente em veículos automotivos. Nesse tipo de transmissão, o torque do motor é transmitido até a saída da transmissão por um conjunto de pares de engrenagens conjugadas. Para que a relação de transmissão seja alterada, é necessário que um par ou mais do conjunto seja desacoplado e que outro par, ou pares, sejam acoplados. Como as engrenagens são rígidas, sistemas mecânicos complexos fazem com que as velocidades tangenciais das engrenagens que serão acopladas se aproximem. Ainda assim, os dentes sofreriam todo o choque causado pelo subto acoplamento da carga ao motor numa nova relação de transmissão, a menos que essas velocidades fossem absolutamente iguais. Para evitar esse choque, o motor é desacoplado da linha de transmissão no instante da alteração da relação de transmissão (mudança de marcha) com o uso de uma embreagem. Como o veículo possui inércia maior do que o motor, a sua velocidade será relativamente estável durante o curto período da troca de marchas e o eixo de acionamento da transmissão (entrada) pode ser levado até uma velocidade compatível com a do veículo. Nesse instante, o eixo de entrada da transmissão estará acoplado por engrenagens ao eixo de saída; o eixo do motor poderá estar em rotação diferente. Com o alívio da embreagem pelo condutor do veículo, a embreagem serve de acoplamento entre o motor e a transmissão: se as rotações forem diferentes, os elementos de atrito da embreagem deslizarão até que estas sejam iguais.
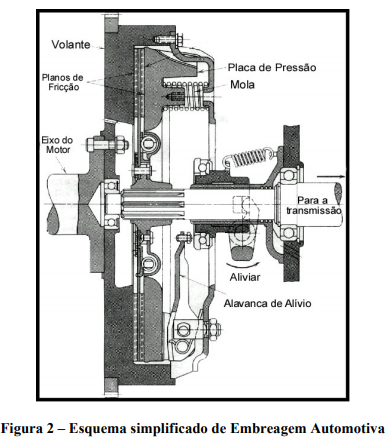
A figura 2 mostra um tipo simples de embreagem automotiva. Este tipo trabalha a seco, ou seja, os discos não estão embebidos em óleo, o que serviria para resfiamento do conjunto. A embreagem mostrada está na posição acionada. Nessa posição, o volante, preso ao eixo do motor, está transmitindo o torque através de parafusos à placa de pressão. As molas, normalmente de 6 a 10, pressionam essa placa contra o disco, que também se apóia no volante do lado oposto. O disco é identificado na figura pelas laterais que atritam com os elementos citados, chamadas de planos de fricção. O conjunto volante-eixo do motor funciona como um cubo, no qual é colocado um rolamento para apoiar o eixo de saída da embreagem, que vai para a transmissão. Assim, ambos os eixos permanecem alinhados e podem trabalhar em rotações diferentes quando a embreagem não está transmitindo torque.
Utilizar a expressão “embreagem acionada” poderia dar margem a uma interpretação errada do que ocorre. Quando o condutor aciona a embreagem, os eixos se desacoplam e a embreagem poderia ser considerada como que na posição não acionada. Assim, é necessário definir o que se deseja dizer: quando for dito que a embreagem está acionada fica convencionado que o condutor acionou a alavanca de embreagem e os eixos deixaram de estar acoplados. Na figura 2, quando o condutor aciona o pedal da embreagem,um cabo aciona a alavanca mostrada com o nome “aliviar”, que desloca o cubo mostrado ao longo do eixo. Esse movimento move a alavanca de alívio comprimindo as molas contra a a cobertura externa da embreagem, fazendo com que a placa de pressão se afaste do disco e a embreagem seja desacoplada
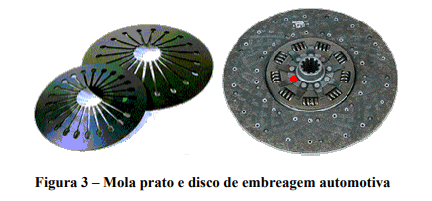
Atualmente, o tipo mais comum de embreagem automotiva não utiliza molas helicoidais, mas um tipo especial de mola prato, chamada vulgarmente de chapéu chinês. A figura 3 mostra esse tipo de elemento, à esquerda. Mostra também, a direita, um disco de embreagem comum. As molas centrais são para amortecer os choques torsionais.
Um tipo de embreagem também empregada em veículos automotivos, em especial em caminhões de pequeno porte e caminhonetes, é a de múltiplos discos. Também empregada em máquinas agrícolas e outros dispositivos mecânicos, esse tipo de embreagem faz uso de um número maior de discos para transmitir torque elevados. Como vantagem, ocupa um espaço radial muito menor do que as embreagens convencionais à seco; como desvantagem, ocupam um espaço axial muito maior. Como a dimensão radial é menor, é mais difícil trocar o calor gerado durante o acoplamento, e os discos precisam ser embebidos em óleo para resfriamento. Isso reduz significativamente o coeficiente de atrito entre as superfícies, mas implica em utilizar uma força normal entre os discos maior para transmitir um torque adequado. O menor coeficiente de atrito diminui o desgaste por disco, mas a maior força normal torna a aumenta-lo. Como o desgaste é proporcional ao trabalho realizado e este é dividido entre os discos, embreagens desse tipo duram mais até a reposição dos discos. Esse tipo de embreagem também é utilizada como freio.
2.1.1 Embreagens Cônicas
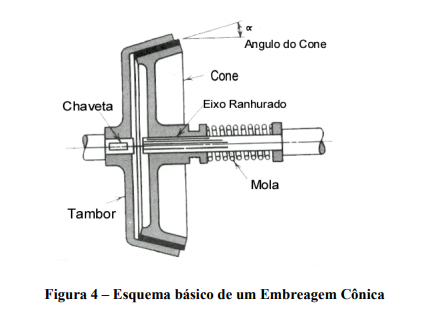
Embreagens cônicas são utilizadas quando se deseja grande amplificação da força de aplicação sem que haja limitação axial para deslocamento. O princípio básico é o da cunha: quando a parte chamada cone desloca-se para a esquerda da figura, pela ação da força da mola, surge uma pressão nas superfícies de contato, que aumenta conforme o deslocamento axial aumenta. Esse esforço gerado depende da força da mola e do ângulo do cone ( ). Para desacoplar a embreagem, basta mover o cone para a direita
A grande vantagem desse tipo de embreagem é permitir um grande esforço normal nas superfícies em contato sem um apreciável esforço de engate. A desvantagem é o movimento axial, nem sempre possível na maioria dos dispositivos. Embreagens cônicas também são empregadas como freios.
2.1.2 Freios à Disco
Um freio à disco é basicamente uma embreagem à seco na qual um dos elementos trabalha em rotação nula. Assim, o disco, que normalmente é o elemento ligado ao eixo girante, é acoplado a um eixo com velocidade nula através de uma pinça. Essa está presa à estrutura do veículo ou dispositivo. pinça pode ter acionamento pneumético, como em veículos ferroviários e alguns freios de caminhões e ônibus; hidráulico, como na maioria dos veículos comerciais de pequeno porte, ou outro (elétrico, magnético, por esforço centrífugo, ...)
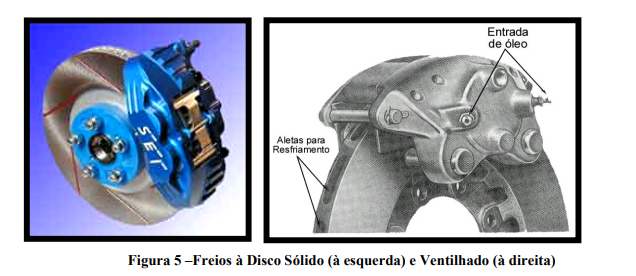
Devido ao grande torque a ser transmitido, normalmente até duas ou três vezes maior do que o do motor, os discos necessitam de grande área de resfriamento. Por isso, apenas parte de sua superfície é utilizada como superfície de atrito a cada instante. As pastilhas de freio, que fazem a função da placa de pressão e do volante nas embreagens, ocupam uma pequena parcela da área total do disco. Para facilitar a reposição, o material de atrito fica nas pastilhas e não nos discos, que são normalmente metálicos (ferro fundido, aço, alumínio, ...). Os discos podem ser sólidos, para menores potências de frenagem, ou ventilados. Esses últimos podem ser ventilados por aletas internas ou por furos na superfície de atrito, como em motocicletas. Os furos também têm a função de retirar o material desgastado da região de contato entre a pastilha e o disco. A figura 5 mostra um sistema com disco sólido, à esquerda, e outro com um disco ventilado, à direita. No sistema da esquerda, o freio tem provavelmente dois cilindros de acionamento de cada lado, permitindo uma melhor distribuição de pressão sobre a pastilha. No freio da esquerda é mostrada a entrada de óleo sob pressão que alimenta o cilindro da pinça; também é mostrada a saída do óleo para retirada de bolhas de ar, sob a mesma designação de “entrada de óleo”.
2.1.3 Freios à Tambor com Sapatas Externas
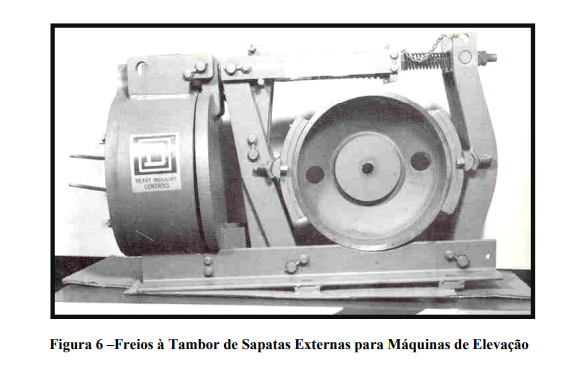
A figura 6 mostra o tipo mais comum de freio de tambor de sapatas externas. É utilizado em maquinas de elevação, tais como pontes rolantes, elevadores, gruas, etc... Normalmente é composto de duas sapatas simetricamente dispostas em torno de um tambor, que é ligado a carga a ser freiada. No caso da figura 6, o tambor provavelmente está ligado a um outro tambor para enrolamento de cabos de aço de um elevador. No sistema mostrado, o acionamento é eletromagnético, mas também pode ser pneumático e, mais raramente, hidráulico ou manual. Quando o freio é acionado, o conjunto de alavancas atua no sentido de aplicar pressão entre as sapatas, que contém o material de atrito substituível, e o tambor.
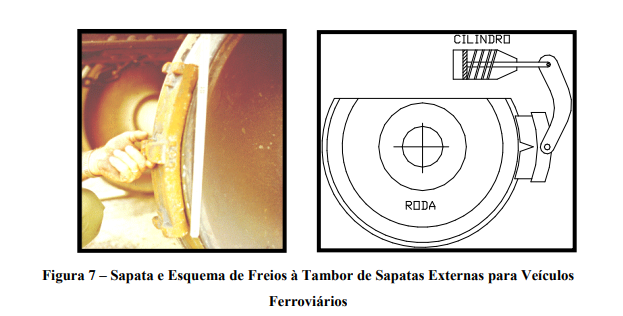
O tambor de freios mostrado serve também para dissipar o calor gerado na interface com as sapatas. Um freio semelhante a esse é empregado em veículos ferroviários. No caso desses veículos, a sapata é pivotada em torno de um pino que a liga ao sistema de alavancas. A figura 7 mostra uma sapata colocada sobre a roda, à esquerda, e o esquema pneumático de aplicação dos freios ferroviários, à direita. Apenas um cilindro é utilizado para cada vagão em veículos de carga. Para locomotivas e alguns tipos de carros de passageiros, cada roda tem seu próprio cilindro de acionamento. Veículos ferroviários dissipam o calor através das rodas, que o transfere por convecção em sua superfície ou por condução no contato com o trilho. O aquecimento nas rodas é a causa de diversos problemas encontrados em ferrovias de carga, tratados em fontes específicas.
2.1.4 Freios à Tambor com Sapatas Internas
O freio de tambor de sapatas internas é utilizado normalmente como freio trazeiro de veículos de passeio ou como freio de caminhões e ônibus. Consiste também de duas ou mais sapatas que são aplicadas contra um tambor de freios, mas na face interna deste. Para tambores cilíndricos sólidos, como o mostrado na figura 6, fica difícil imaginar como as sapatas poderiam ser aplicadas na face interna, mas se considerarmos o tambor como um anel ou um cilindro vazado as sapatas podem ser colocadas no interior ou sobre a superfície externa, causando o mesmo efeito de frenagem
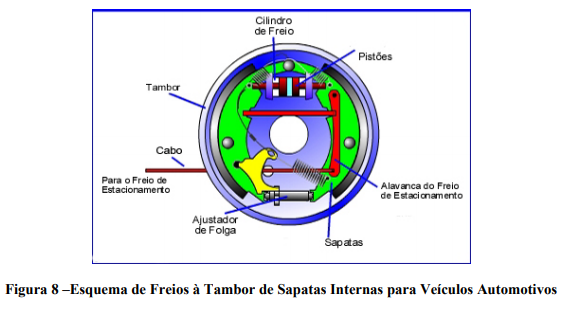
A figura 8 mostra um esquema simplificado deste tipo de freio. Nele são mostrados o cilindro de freio, que recebe a pressão hidráulica do sistema de acionamento; os pistões do cilindro, que se movem aplicando a sapata sobre o tambor; as sapatas, que consistem no suporte metálico (contrasapata) e na lona de freio; o tambor, que é a parte que gira do conjunto e é solidário à roda em veículos; o cabo, que serve para aplicar o freio manualmente através da alavanca do freio; e o ajustador de folga, que move a lona para mais perto do tambor conforme esta vai sendo desgastada, diminuindo o curso até a frenagem. No tipo de freio mostrado, a força gerada no cilindro hidráulico move a parte superior das sapatas, que estão ancoradas no ajustador de folga. Com essa restrição, as sapatas não se movem lateralmente, mas giram em torno do ponto de ancoragem. Fica evidente que o apoio da sapata sobre o tambor se dá principalmente na parte superior desta, fazendo com que a pressão de contato seja maior nessa região.
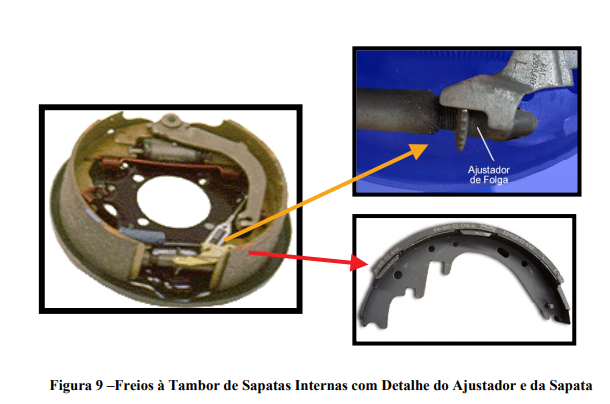
A figura 9 mostra um tambor de freio típico com o ajustador de folga e uma sapata mostrados em detalhe. Conforme a sapata é desgastada, a alavanca do ajustador de folga se move. A alavanca está apoiada em uma catraca que gira quando a primeira se move. Com o movimento da catraca a rosca de um parafuso espaçador também gira, distanciando o ponto de ancoragem das sapatas e fazendo com que estas fiquem mais próximas do tambor. Essa proximidade controlada é importante para que o tempo de resposta do sistema seja reduzido
2.2 Transmissão
A transmissão é um dos componentes mais importantes da mecânica do seu carro. Sem a transmissão que não podia se mover mais rápido do que 20 milhas por hora, nos trazendo de volta aos dias de carroça e um cavalo.
A transmissão regula a velocidade do pneu com a velocidade do motor e envia a potência do motor para as rodas.
Você pode pensar que o motor é o componente mais complicado na mecânica do carro, mas na verdade é a transmissão, tornando-se importante compreender o que a transmissão faz e como faz o que faz. Este artigo irá cobrir os temas mencionados e abrange também os sinais de problemas com as transmissões e quando começar a reparação de transmissão.
A transmissão faz muito mais do que o poder de transferência. É o componente na parte traseira do motor que liga o motor para as rodas. Sua função é manter a velocidade do motor em um certo número de RPM (Revoluções Por Minuto) porque o motor trabalha melhor quando rodando em velocidades que não são muito rápidos e não muito lento.
Há muitos componentes diferentes para a transmissão. conjuntos de engrenagens planetárias, sistema hidráulico, embreagens e bandas, selos e juntas, e um conversor de torque são todos os componentes juntos para entregar o poder a seu carro. conjuntos de engrenagens planetárias ajustar para diferentes velocidades e inversa. O sistema hidráulico manda óleo para o sistema de marchas através das garras e bandas. Vedações e juntas estão lá para manter o petróleo, onde é suposto ser, que abrange os conjuntos de engrenagens planetárias, assim que tudo corra bem. O conversor de torque é um mecanismo de embreagem, permitindo que as engrenagens para mudar sem parar.
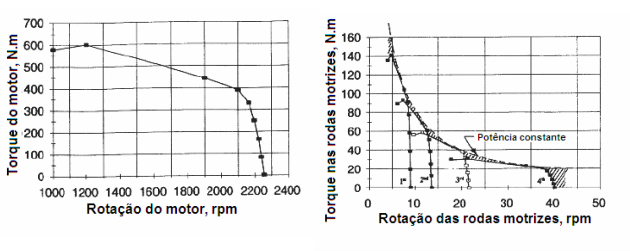
2.2.1 Rotação e torque das rodas motrizes:
Em que:
- N e = rotação do motor, rpm
- N A = rotação das rodas motrizes, rpm
- T e = torque do motor, N.m
- T A = torque nas rodas motrizes, N.m
- Ept = e T.e D.eFD = eficiência do sistema de transmissão de potência, produto das eficiências da caixa de marchas (e T), do diferencial (e D) e da redução final (eFD )
- Gpt = G T.G D.GFD = relação de transmissão do sistema, produto das relações de transmissão da caixa de marchas (G T), diferencial (G D) e redução final (GFD)

2.2.2 Tipos de transmissões
- Engrenagens deslizantes
- Engrenagens constantemente engrenadas
- Engrenagens acopladas com sincronizador
- Engrenamento com embreagens acionadas
- hidraulicamente (Power-Shift)
- Transmissão continuamente variável (CVT)
- Hidrocinética
2.3 Projeto de Engrenagens
Cilíndrica de dentes retos
Esse tipo de engrenagem tem a finalidade de fazer variações na força e na velocidade de rotação de eixos, por meio da mudança do tamanho do raio da engrenagem. Ela possui dentes retos, que dão o nome à engrenagem, e são normalmente instalados em eixos paralelos, ligando os dentes de uma engrenagem com a outra.
Esse é um dos tipos de engrenagens que pode ser facilmente encontrado no mercado e possui baixo custo em relação a outros, devido à sua simplicidade na produção, porém há a desvantagem de produzir ruídos em seu funcionamento. Ainda há o fato de serem compactas, fáceis de instalar e altamente confiáveis. Outro ponto a se considerar é que essa engrenagem é comumente usada para transmitir grande quantidade de energia, além de ser extremamente eficiente na transmissão da energia fornecida a ela. Possui um percentual pequeno de dissipação e, com isso, otimiza o processo em que ela está inserido.
As engrenagens dentes retos têm uma ampla gama de aplicações, sendo utilizadas em motores, como marítimos e de automóveis, relógios, máquinas de lavar roupa, siderúrgicas e na fabricação de trens. Nos relógios mecânicos, por exemplo, elas são utilizadas para ajustar as velocidades relativas dos segundos, minutos e horas.
Hoje em dia, esses tipos de engrenagens também são confeccionados em impressão 3D, o que faz seu custo ser mais em conta.
Cilíndrica de dentes helicoidais
Engrenagens cilíndricas de dentes inclinados, ou helicoidais, são construídas com dentes que não são alinhados e paralelos ao eixo. Ao invés disso, são inclinados de forma a definir um ângulo entre o eixo e o segmento dos dentes.
Uma vantagem desse tipo de engrenagem consiste no fato de que os dentes se engatam pouco a pouco, ao invés de toda a face ao mesmo tempo. Isso gera um impacto menor, que está estritamente relacionado à quantidade de ruído produzido. Sendo assim, as engrenagens cilíndricas de dentes helicoidais têm uma operação mais silenciosa em relação às de dente reto, por exemplo.
Além disso, podemos citar que para uma engrenagem de mesma largura, as engrenagens cilíndricas de dentes helicoidais podem sustentar mais carga comparado às de dentes retos. Isso porque o dente da primeira é maior, uma vez que está posicionada de forma inclinada. Assim, é proporcionada uma maior segurança ao lidar com forças e velocidades maiores.
As engrenagens cilíndricas de dentes helicoidais são utilizadas em vários segmentos da indústria, porém, sendo comum em indústria automobilística, em caixas de marchas, na indústria siderúrgica, na indústria ferroviária e alimentícia também, tendo sempre uma ampla ligação com grandes cargas e velocidades. Também deve-se levar em conta que, se o ruído é o principal critério de design, se vê necessário a escolha da engrenagem helicoidal.
Cônica de dentes retos
Nesse tipo, a engrenagem possui uma forma cônica. É importante ter um cuidado maior com ela por ser inclinada e, assim, estar sujeita a emperramentos ou ao desencaixe. Por isso, o encaixe deve ser feito cautelosamente, a fim de evitar tais problemas.
A maior vantagem da engrenagem cônica é que ela pode mudar a direção de um giro e sua força, podendo transmitir a energia entre eixos com diferentes ângulos entre eles. Apesar disso, esse é um dos tipos de engrenagens que requerem precisão muito grande na montagem. Isso se dá porque o formato dos dentes deste tipo de engrenagem faz com que o impacto da movimentação atinja um dente por vez e, por isso, ela pode se tornar áspera e se desgastar com o tempo. Caso não sejam tomados os devidos cuidados, pode haver maior dificuldade na fabricação, pois a geometria da engrenagem não é fácil de ser confeccionada como a cilíndrica.
Outro ponto a ser levantado é o fato de que esse é um dos tipos de engrenagens que não suportam altas velocidades e cargas, justamente pelo fato dos dentes não serem paralelos em relação aos dentes da outra engrenagem à qual está ligada.
A engrenagem Cônica de Dentes Retos pode ser de diferentes tamanhos, pois costuma ser usada em muitos maquinários. Cabe assim à pessoa analisar qual o tamanho correto da peça para sua máquina.
Cônica de dentes helicoidais
A engrenagem cônica de dentes helicoidais, assim como acontece na cilíndrica, possui diferenças claras em relação à reta. Sua forma permite um aproveitamento muito grande da energia que é oferecida ao sistema de engrenagem. Os dentes, por serem inclinados e de maior comprimento, aumentam a eficiência e diminuem os ruídos.
É importante frisar que, por conta de ser helicoidal, ela aguenta transmitir grandes cargas e altas velocidades e, por causa disso, deve ser feita por material que suporte o impacto que uma engrenagem irá receber da outra, para assegurar a segurança e durabilidade.
Como foi dito, esse é um dos tipos de engrenagens que são utilizados em máquinas com sistemas que aguentem cargas maiores. Transmissões que precisam, além da sustentação da carga, velocidades de transmissão elevadas, também se utilizam dessa engrenagem.
Cônica de dentes hipóides
As hipóides estão inseridas nas engrenagens cônicas, porém elas têm algumas particularidades que apresentam vantagens sobre as outras. A principal delas é ter os eixos das engrenagens descentralizados, ou seja, a linhas dos eixos não se encontram. Isso permite uma margem de translação do eixo da segunda engrenagem, que é compacto e pode ser usado em espaços limitados.
Outra vantagem é que as hipóides têm dentes longos, o que aumenta a cobertura dentada. Por essa razão, as engrenagens hipóides conseguem transmitir mais torque do que engrenagens helicoidais simples no mesmo espaço.
No entanto, a separação dos eixos causa um deslizamento adicional dos dentes e gera maior quantidade de calor, obrigando o uso de óleos lubrificantes especiais, que são os de alta viscosidade e devem ser aplicados periodicamente. Podemos perceber, então, que é um dos tipos de engrenagens requer um cuidado particular.
Podemos ressaltar que, como nas engrenagens cônicas de dentes espirais, as hipóides aguentam cargas maiores, até maiores do que as espirais, porém são utilizadas para baixas velocidades.
As hipóides têm algumas aplicabilidades comuns com a cônica helicoidal, porém é utilizada em casos de cargas maiores e caso precise se adaptar a alguma particularidade explicitada acima. O sistema de transmissão do carro, por exemplo, se utiliza do hipóide por ser silencioso e, principalmente, devido à propriedade de descentralização dos eixos. Além dos carros, também são usados em tratores e caminhões com pesos maiores.
Cônica de dentes espirais
As engrenagens cônicas de dentes em espiral apresentam os dentes inclinados e curvos, em espiral, como o próprio nome diz. Ela carrega em si as principais propriedades das cônicas, que é um suporte maior em questão de cargas muito elevadas, operação silenciosa e a otimização da transmissão de potência em relação às não-cônicas, tendo uma eficiência maior.
Sendo assim, sua particularidade consiste na capacidade de operar com números maiores de rotações por minuto sem maiores problemas. Isso permite que esse tipo de engrenagem seja utilizada em atividades que tenha esse objetivo de alcançar maiores velocidades, como exemplo a indústria automobilística.
Além disso, a engrenagem cônica com dentes em espiral é muito requisitada quando há a necessidade de mudança da rotação de um eixo, uma vez que a configuração inclinada e curva de seus dentes permite tal operação. Seus dentes são fixos em um determinado ângulo, o que permite a distribuição da pressão e suavidade na interação das peças, características que permitem adequação a inúmeras atividades.
Apesar disso, devido à configuração especial de seus dentes, esse é um dos tipos de engrenagens que possui alto custo de fabricação.
Existem empresas que produzem engrenagem cônica com dentes em espiral específicas para cada projeto. Sua fabricação e desenvolvimento variam de acordo com a finalidade, mas ela tem ampla aplicação na indústria alimentícia, em suas máquinas e aparelhos, em algumas partes de motores de carros, junto com as engrenagens helicoidais e hipóides, na indústria petrolífera e na mineração também.
Parafuso sem-fim
A engrenagem parafuso sem-fim opera de forma diferente em relação às outras.
O mecanismo consiste em outra engrenagem, como uma de dentes retos, girar, fazendo a engrenagem sem-fim se movimentar também, porém em velocidade bem menor.
Portanto, a engrenagem sem fim é muito utilizada quando é necessário que a velocidade de transmissão da força para uma segunda engrenagem seja reduzida. Esse tipo de engrenagem costuma ter reduções de 1:20, chegando até a valores maiores do que 1:300. Grande parte dos modelos de engrenagens nesse caso opera em altas velocidades, e a engrenagem sem-fim é utilizada para diminuir essa velocidade, já que ela possui uma taxa de transmissão mais baixa.
Outro fato é que muitas engrenagens sem-fim têm uma propriedade interessante diferente das demais: o eixo (rosca sem-fim), gira a engrenagem (pode ser de dente reto) facilmente, mas a engrenagem não consegue girar o eixo. Essa característica é útil para máquinas como transportadores, nos quais a função de travamento pode agir como um freio para a esteira quando o motor não estiver funcionando.
A aplicação desse tipo de engrenagem se dá por sistemas de embreagens, em relógios, sistemas de elevadores e em diversos equipamentos industriais que necessitam de alta precisão de movimento e/ou precisem de uma redução de velocidade alta durante o processo.
Planetárias
A engrenagem planetária é constituída, normalmente, por 4 engrenagens. Elas são a engrenagem solar, que fica na parte externa, as 3 engrenagens satélites, que são aquelas que giram em torno da solar e a engrenagem anelar, acoplada ao eixo do suporte.
Esse tipo de engrenagem tem o papel de captar a alta velocidade de rotação proporcionada por um motor e transformá-la em um grande torque, que é transmitido para as engrenagens satélites, alcançando a otimização da potência.
Além disso, a engrenagem planetária possui vantagens em relação às outras, como um produto mais compacto e mais leve para a potência produzida e alta resistência, mesmo sendo leve. Também temos que falar que ela é ideal para clientes que querem alcançar altos índices de redução, já que esse tipo de engrenagem consegue ter uma redução de velocidade relevante em relação às outras.
Essas engrenagens têm aplicações em automóveis, em que são necessários torques menores. Mas além disso, elas são usadas dentro das indústrias, por exemplo, em controle de turbinas eólicas e alimentadores de papel e motores elétricos.
Cremalheira
As cremalheiras consistem em um mecanismo simples, mas que tem muitas aplicações. A engrenagem cilíndrica (ou helicoidal), normalmente de dentes retos, é acoplada ao trilho, que é chamado de cremalheira. As duas formas geométricas diferentes desse tipo de engrenagem (uma cilíndrica e outra retilínea) permitem transformar o movimento circular em longitudinal, por meio do trilho horizontal, ou vice-versa.
Essa engrenagem é geralmente usada em operações que precisam de um controle de um operador, já que este pode controlá-las por um sistema onde se aciona e desliga a atividade da engrenagem.
Nós encontramos esse tipo de sistema na direção de automóveis, em portões de correr automáticos, utilizados nas maiorias dos condomínios hoje em dia, em ferrovias, possibilitando que o trem passe em terrenos íngremes e em inúmeras máquinas industriais.
Ainda podemos encontrar a cremalheira em elevadores de obras, que facilita a movimentação de pessoas e materiais no andamento da mesma. Assim, podemos perceber que esse tipo de engrenagem, apesar de ser simples, tem muitas aplicações e utilidades no mercado.
De um modo geral, é possível perceber que os tipos de engrenagens têm inúmeras utilidades, em todo tipo de indústria e, por isso, é de suma importância. Fique atento a esse fato no detalhamento do projeto, antes de começar a construir a sua máquina, para garantir o seu máximo aproveitamento.
2.4 Engrenagens usadas em caixas de marchas
2.4.1 Sincronizador
Sincronizador é uma engrenagem da caixa de velocidades dos automóveis cuja função é sincronizar a velocidade da mesma com a outra fazendo com que se encaixe perfeitamente sem causar trancos, possibilitando a troca de marcha suavemente. Esta peça é confeccionada geralmente em latão ou ligas sintéticas.
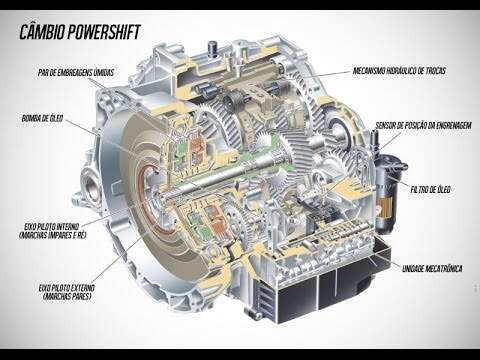
2.4.2 Power-Shift
O câmbio automatizado Powershift é uma tecnologia desenvolvida de forma pioneira pela Mercedes-Benz. Inicialmente, o recurso equipava somente os modelos extrapesados Axor e Actros. Hoje, o sistema também está a bordo de modelos semipesados da marca, o que torna a linha de caminhões da fabricante muito mais competitiva.
Totalmente automatizado, o Powershift dispensa o uso do pedal de embreagem, o que torna a jornada de trabalho do caminhoneiro muito mais prazerosa e menos cansativa. Além do conforto, a tecnologia agrega segurança na condução pelas estradas.
Os administradores de frotas também vão virar fãs do Powershift, pois ele minimiza os efeitos causados pelos diferentes maneiras de dirigir entre motoristas que usam o mesmo veículo. No fim das contas, isso traz uma significativa economia no consumo de combustível geral da frota.
Como se não bastasse todas as vantagens já citadas, o Mercedes PowerShift G-211 12K une três funções inovadoras: EcoRoll, Power e Manobra. A EcoRoll é um módulo que coloca a transmissão em neutro de forma segura e controlada. O procedimento é executado sem a intervenção do motorista e auxilia ainda mais na redução de consumo. O modo Power permite que, durante 10 minutos, as trocas de marchas sejam feitas em rotações mais elevadas, sendo ideal em momentos de ultrapassagens e naquelas subidas íngremes. Já a função Manobra propicia um controle preciso do veículo na movimentação em pátios e espaços de paradas, contribuindo para maior segurança de todos.
Pra completar, o Powershift não usa os anéis sincronizadores, mas sim engrenagens mais largas e robustas, que aumentam a durabilidade, com menor necessidade de manutenção.
2.5 Transmissão continuamente variável
Transmissão continuamente variávelé um tipo de transmissão que simula uma quantidade infinita de relações de marcha, uma vez que funciona com um sistema de duas polias de tamanhos diferentes interligadas por uma correia metálica de alta resistência, em vez de engrenagens com determinados tamanhos. O conceito do CVT foi idealizado em por Leonardo da Vinci em 1490, contudo a primeira patente do sistema foi registrada 1886.
É usado principalmente em pequenos veículos como motocicletas, jet skis, karts, snowmobiles e carros de golfe, tem vindo a ser incorporado a veículos maiores como carros de passeio e pickups, é também considerado um tipo de câmbio automático, apesar de seu funcionamento ser diferente.
Nos carros, além da aceleração contínua, sem trancos, o que dá a impressão de que o carro nunca troca de marchas, o sistema CVT, proporciona economia de combustível em relação a todos os outros sistemas anteriores. Sejam sistemas automáticos ou manuais.
2.5.1 VDP (Variable-Diameter Pulley - Polias de Diâmetro Variável)
É o tipo mais comum de CVT, com duas polias: uma polia de entrada "condutora" variável e uma polia de saída "conduzida" também variável, ligadas por uma correia de metal ou borracha para alta potência. Consiste na adoção de duas polias com diâmetro variável, as polias são ligadas entre si por uma correia ou por algum outro tipo de acionamento mecânico. A polia principal está ligada ao motor pelo conversor de torque, já a polia secundária está ligada ao sistema diferencial. Conforme uma das polias diminui de diâmetro a outra polia aumenta de diâmetro alterando a relação de transmissão dos eixos. A relação do diâmetro entre as polias e a variação da velocidade de rotação determina a força transmitida para as rodas e faz com que o motor sempre trabalhe na rotação mais próxima do ideal.
2.5.2 T-CVT (Toroidal CVT)
Feito com discos e roletes, a relação é dada com o movimento dos discos para cima ou para baixo. Estes discos tem por objetivo permitir a variação da velocidade do veículo. Quando um lado do rolo de tração move-se para o centro (lado menor) do disco, a outra extremidade fica em contato com o lado maior do disco, fazendo com que o veículo desacelere. A aceleração do veículo obtém-se quando o rolo de tração está em contato com o lado maior do disco de entrada e a outra extremidade do rolo está em contato com o lado menor do disco de saída. É este sistema que permite uma transmissão com variações rápidas na velocidade. Mesmo sob cargas elevadas, o óleo lubrificante de 1/1000 mm de espessura é formado nos pontos de contato entre os discos e os rolos de tração. Um óleo especial que torna-se sólido sob alta pressão nos pontos de contatos que permite a passagem de força do disco para o óleo e do óleo para os rolos. O filme lubrificante não se rompe em nenhuma condição, evitando, assim, escamamentos. Para se realizar esta aplicação requer, muita precisão dos discos e dos rolos de tração, assim como o óleo de tração com alto coeficiente de atrito.
Transmissão baseada nas CVTs; O CVT toroidal tem como inovação o uso de rolamentos (dois pares),com o objetivo de variar as relações em vez de corrente ou correia os mais usados. Os rolamentos estabelecem a ligação do eixo de entrada (ou eixo condutor) (ligado ao virabrequim) e o de saída (ou eixo conduzido) (ligado à árvore de transmissão). A variação de relação é obtida pelo ângulo de trabalho formado pelo rolamento. Os CVTs tipo toroidal têm como principal vantagem a possibilidade de trabalhar com torque elevado, o que não ocorre com CVTs de polia de diâmetro variável.
2.5.2 CVT Cone ou CVT de Fricção
Funciona com dois cones ligados por uma correia. Neste tipo de CVT duas polias rotativas são colocadas em contato em pontos de distância variável de seus eixos de rotação. Desse modo a fricção entre as polias rotativas permite uma transferência de potência de uma polia à outra. Uma correia em V ou uma roda são utilizadas para transferir potencia entre as polias. Se posicionada a roda na extremidade do raio menor do cone condutor a marcha será lenta e de alto torque porém se a roda for posicionada na extremidade de maior raio do cone condutor, gera alta velocidade do cone conduzido e um torque menor.
2.6 Transmissões hidrocinéticas
Turbinas hidrocinéticas configuram-se como maquinas hidráulicas capazes de gerar eletricidade através de correntes fluviais ou marítimas, sem a necessidade da construção de barragens. Sua estrutura e princípios físicos se assemelham ás turbinas eólicas, fazendo uso do fluxo de água em vez do fluxo de vento, sendo mais vantajosas do ponto de vista da maior confiabilidade e constância das vazões d'água. As turbinas hidrocinéticas são compostas por pás que transmitem o movimento de rotação para um eixo, o que transmite o movimento de rotação para uma transmissão de potencia que pode ser feita com polias, correntes ou engrenagens, chegando finalmente ao gerador que transforma a energia mecânica em energia elétrica. Podem gerar de 0,25 kW a 10 MW de acordo com as condições do projeto, tais como níveis de altura do rio e velocidade da água em um área determinada. Há dois principais tipos de turbinas hidrocinéticas, as de eixo horizontal ou vertical, conforme a tabela abaixo.
O eixo de entrada aciona um propulsor que gera um fluxo de óleo dentro da unidade, o fluxo de óleo aciona a turbina que está ligada ao eixo de saída
Nas transmissões hidrocinéticas a rotação de saída automaticamente se reduz com o aumento de torque aplicado no eixo de saída e vice versa. Por isso, transmissão hidrocinética não tem um relação de transmissão definida.
Transmissão hidrocinéticas são muito ineficientes quando a relação de transmissão é muito baixa ou muito alta, assim, as transmissões hidrocinéticas são usadas em série com um sistema de engrenagens planetárias de duas ou três velocidades.
Não há necessidade de embreagem de tração, relação de transmissão é modificada automaticamente
Em veículos pesados, a transmissão hidrocinética é útil quando não se necessidade de um controle rígido de rotação, se a variação de velocidade é crítica, a transmissão hidrocinética precisa ser travada.
3 Comparação entre diferentes tipos de transmissões
Transmissões usando engrenagens deslizantes ou previamente engrenadas são simples, eficientes mas difícil de variar a relação de transmissão com o veículo em movimento
O sincronizador facilita o trabalho de mudança da relação de transmissão mas ainda é necessário que se use a embreagem de tração
O sistema power-shift permite a troca de marchas sem necessidade de acionamento do pedal da embreagem (incluído apenas po r razões de segurança). Sistema power-shift permite ganho de produtividade em relação ao sistema anterior.
Para tornar o sistema mais barato geralmente se usa o sistema power-shift de duas velocidades em série com transmissão com sincronizador, a produtividade do veículo aumenta quando se tem mais opção de relação de transmissão para que se possa adequar melhor a carga às condições de trabalho do motor .
O sistema CVT é teoricamente o sistema mais flexível de troca da relação de transmissão, o único tipo de CVT disponível para veículos pesados é o que usa transmissão hidrostática.
A transmissão hidrocinética não tem relação de transmissão definida. Ela ajusta automaticamente a rotação de saída para mudar o torque de saída. Fornece controle automático em função da carga em uma curva de potência constante. Em tratores agrícolas é melhor utilizada em trabalhos pesados de preparo de solo e operações em que a velocidade de deslocamento não é crítica. Se a variação de velocidade é crítica, a transmissão hidrocinética precisa ser travada
3.1 Ressonância entre transmissões e simulação por computador
Eixos são submetidos a deflexão torcional em resposta ao torque aplicado, agindo como molas torcionais, algumas massas rotacionais na transmissão são grandes e têm inércia significativa.
Molas torcionais fazem com as massas rotativas oscilem torcionalmente nas frequências naturais que são proporcionais à raiz quadrada da razão entre a constante de mola torcional e a inércia.
Pertubações torcionais ocorrem na transmissão devido aos harmônicos do motor, contato entre os dentes das engrenagens, e outros.
Devido à complexidade dos sistemas de vibração, a simulação por computador tem sido usada para modelar e analisar tais sistemas. •
- Tipos de análises:
- Análises modais para determinação das frequências naturais e modos de vibração
- Análise de tensões em regime permanente e regime transiente
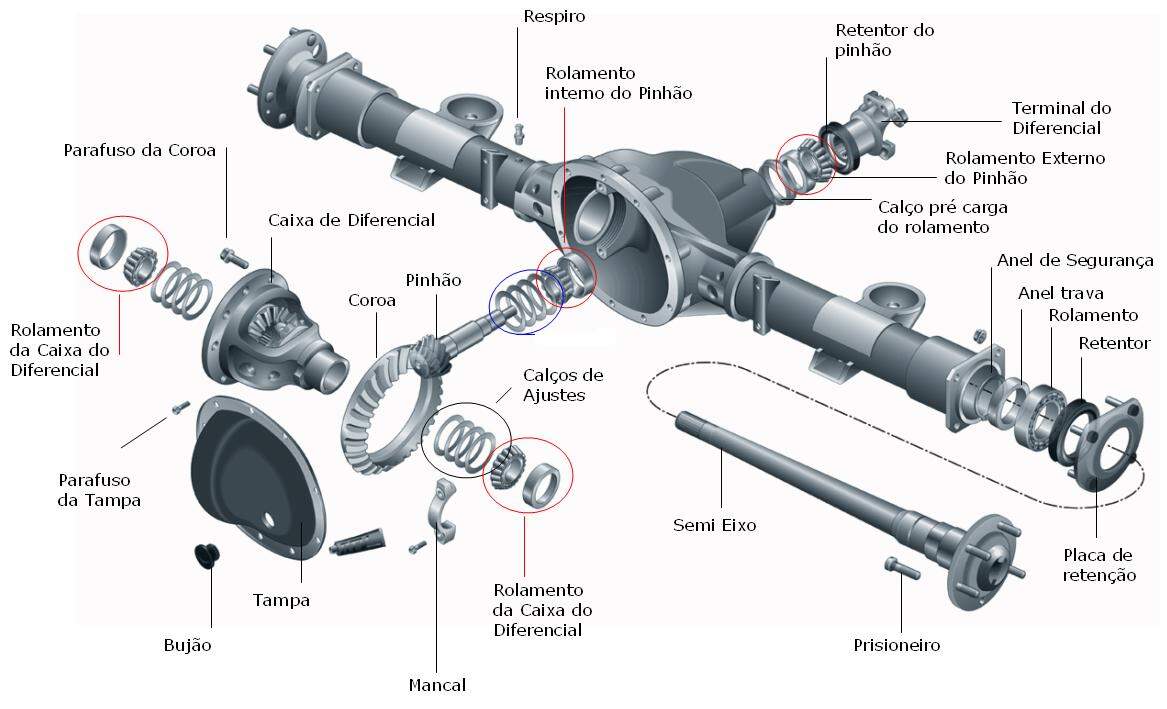
3.2 Diferencial
O diferencial é um dispositivo mecânico indispensável em veículos de tração. O diferencial tem a função de transferir e distribuir uniformemente o torque a dois semi-eixos que em principio giram em sentidos opostos, possibilitando assim, a cada eixo, uma gama de velocidade e rotações diferentes.
O diferencial possibilita transmissão da rotação igual aos semi-eixos, independentemente das suas velocidades de rotação.
Um diferencial transfere, mediante rodas dentadas (engrenagens), as rotações da esquerda para direita da transmissão, pelo eixo cardã e , quando equilibrado, transforma em movimento único (para frente ou para trás quando se engata a ré) (a ré muda o sentido de rotação do eixo cardan, e não o diferencial), ou seja, com a ré engatada o eixo cardan move-se da direita para esquerda e o diferencial gira para trás.
Em geral, o diferencial é aplicado nos veículos terrestres tracionados por motores de qualquer natureza. O torque é produzido pelo motor e chega ao diferencial através do eixo cardã, e assim é dividido entre as duas rodas de tração. Uma das principais atuações do diferencial é no momento da curva, onde uma roda precisa girar mais do que a outra.
O diferencial não mantém o torque igual entre as rodas, podendo inclusive uma roda permanecer em repouso enquanto a outra recebe toda a potência e movimento gerado pelo motor. Isso acontece porque a força tende a "seguir o caminho mais fácil". O diferencial tem um efeito que pode ser considerado como indesejado quando uma das rodas motoras perde aderência devido a piso escorregadio ou muito irregular. Nessas circunstâncias, o diferencial faz com que a roda com menor aderência gire rapidamente, desperdiçando toda potência mecânica produzida pelo motor. Este efeito pode ser eliminado com diferenciais auto-bloqueantes ou com diferenciais com bloqueio manual ou elétrico.
Alguns veículos de tração 4X4 apresentam três diferenciais. Um diferencial em cada eixo e um diferencial central destinado a dividir o torque entre os dois eixos.
3.3 Redução final
Os veículos que aproveitam a potência mediante torque (força) e a pequena velocidade se encontram com o problema de que nas transmissões o que lhes dói, claro, é o torque. Como a potência em um eixo em rotação é o produto do torque pelo regime de rotações, quanto menor seja este, maior será o torque, para a mesma potência transmitida. Os dentes das engrenagens devem resistir, forças maiores quanto maior seja o torque que transmitem e já se compreende que quanto maior a força suportada, maior qualidade (e custo) do material.
Interessa, pois, que a caixa de câmbio, sobretudo, tenha pouca redução de rotações do motor, ou pouco incremento de torque, deixando para depois da caixa fortes reduções. Já dissemos antes que no diferencial se faz uma grande redução no mecanismo pinhão de ataque-coroa. Os tratores, além disto, deixam uma última redução (daí seu nome de “redução final”) no próprio eixo das rodas motrizes.
As reduções finais mais difundidas (ainda que não sejam as únicas) são do tipo de transmissão por planetárias.
independente ou à marcha a ré
Com o esquema tradicional de caixa de marchas e redutora, a marcha a ré era uma das opções da caixa de marchas. Depois, com a organização em “caixa de gamas” e “caixa de marchas”, a marcha ré se converte em uma marcha a mais, para ter várias possibilidades de funcionamento também para trás. À frente (ou entre as caixas), a embreagem de marcha, independe das sub-caixas.
Nos últimos anos se aumentou o emprego de uma sub-caixa de câmbios que agrupa as funções da embreagem e a marcha ré, comandada por embreagens e freios de acionamento hidráulico. São os inversores em carga, que normalmente têm três possibilidades de funcionamento: neutro, à frente e para trás. Neste caso, o conceito tradicional de embreagem (conectado ou não conectado) se modifica porque as posições de trabalho são:
- À frente: seria equivalente a embreado;
- Neutro: seria o equivalente a desembreado;
- Para trás: marcha a ré.
A diferença está em que, ao estarem combinados no mesmo mecanismo a embreagem e a marcha a ré, para conseguir as funções embreado e desembreado deve-se jogar com os dois órgãos de comando do inversor, geralmente um freio e uma embreagem. Em posição “à frente” (embreado), a embreagem tem que estar atuando, mas isto não basta, que, necessariamente, o freio tem que estar desativado. Na posição “neutro” (desembreado) a embreagem e o freio não atuam. Em “marcha a ré”, atua o freio, mas, necessariamente, a embreagem não deve atuar. A diferença é que antes a embreagem era independente e agora está associada com a marcha a ré.
Estes mecanismos costumam estar baseados também em engrenagens planetárias (ainda que nem sempre) e de suas posições de trabalho; a mais curiosa é a neutra. Vejamos por que:
Na embreagem tradicional ou independente há dois eixos, o de entrada e o de saída
- Na posição “embreaado”, estão unidos através do sistema de discos unidos a ambos
- Na posição “desembreado”, são absolutamente independentes um do outro.
No inversor, pela associação da embreagem e da marcha a ré, há 3 eixos: entrada, saída e outro intermediário ou auxiliar do mecanismo. Se o inversor é por planetárias, existem sempre os três eixos.
- Na posição “à frente”, dois eixos estão unidos e o terceiro não deve estar freado. Todo o conjunto gira a uma velocidade igual.
- Na posição “a ré” o freio imobiliza o eixo intermediário, e o eixo de saída gira no sentido contrário (e a velocidade que seja, geralmente algo maior) que o de entrada. É lógico, a embreagem não atua.
- Na posição “neutra” não atuam nenhum dos órgãos de comando, o movimento chega do motor ou da caixa anterior e o eixo de saída pára.
3.4 Sistema de direção para veículos de esteiras
A invenção refere-se a um sistema de controle de direção para um veículo de esteira.
Veículos de esteira são dirigidos pelo acionamento de uma esteira mais rápida ou mais lenta do que a outra. Em alguns veículos de esteira isto é conseguido por um sistema de direção diferencial que inclui uma bomba de deslocamento variável acionada por motor que aciona um motor de deslocamento fixo. Tradicionalmente, tais veículos de esteira tem sido dirigidos simplesmente variando o ângulo da chapa oscilante diretamente com um comando de direção. Um tal sistema apresenta direção agressiva em baixas velocidades do veículo o que diminui a capacidade do controlador de controlar o veículo quando for requerido fino controle de direção. Em adição, tais sistemas não têm proporcionado flexibilidade para mudar o desempenho ou as características funcionais do sistema.
Consequentemente, um objetivo da invenção é proporcionar um sistema de controle de direção do veículo de esteira que aumente a capacidade do operador para controlar o veículo tanto em baixa quanto em elevada velocidades.
Lím outro objetivo da invenção é proporcionar um tal sistema que funcione de modo que a posição do volante de direção seja aproximadamente proporcional à curvatura do giro (inversa do raio do giro) para velocidades do veículo dentro de uma certa faixa de velocidade.
Outro objetivo da invenção é proporcionar um tal sistema no qual a direção toma-se menos agressiva em velocidades de transporte mais elevadas.
Estes e outros objetivos são alcançados pela presente invenção, na qual um veículo de esteira inclui um sistema de direção diferencial que utiliza uma bomba de deslocamento variável e um motor de deslocamento fixo com uma ligação de direção eletro-mecânica. Um sistema de controle de direção detecta a posição do volante de direção, a velocidade do veículo, a velocidade do motor e a direção do veículo para frente ' para trás. Como uma função destas entradas detectadas, um sinal de controle é gerado e é usado para controlar o ângulo da chapa oscilante de uma bomba de deslocamento variável que aciona um motor de direção que aciona um mecanismo acionador de esteira diferencial. O motor de direção adiciona rotação a uma esteira e subtrai rotação de outra esteira. Isto é conseguido por meio de um eixo transversal com engrenagem direta para um conjunto de engrenagens planetárias sobre o lado esquerdo do veículo e engrenagem de inversão para um conjunto de engrenagens planetárias por meio de uma engrenagem de inversão sobre o lado direito do veículo. O sistema funciona de modo que a posição do volante de direção é aproximadamente proporcional à curvatura do giro ( inversa do raio do giro) para velocidades do veículo entre 2 e 4 quilômetros por hora (km/h), em uma velocidade nominal do motor. Acima desta velocidade do veículo, a direção toma-se menos agressiva para velocidades de transporte. Isto permite que um operador tenha melhor controle em engrenagens sob velocidades mais baixas e mais elevadas. Uma mudança na velocidade do motor não muda o raio do giro comandado pelo operador. A medida que a velocidade do trator diminui para zero, a velocidade angular do trator no giro também diminuirá. Se o pedal da embreagem for pressionado e o veículo estiver engrenado, ou a alavanca de mudanças for movida para a posição neutra, o trator costeará em uma parada. Neste caso, o giro ficará mais lento mas não parará. Isto permite que o operador controle melhor seus giros comandados quando parar e iniciar o movimento do veiculo. Este sistema de direção combina as vantagens de um sistema de direção de um veículo de esteira com as vantagens de um sistema de direção de um veículo de roda, e ele pode ser facilmente adaptado para otimizar a capacidade de direção / capacidade de controle para várias aplicações.
Este sistema de direção proporciona controle semelhante ao de um trator para cultura em fileira durante a operação no campo e capacidade de contra-rotaçao durante condições de velocidade de baixa para zero. Preferivelmente, o volante de direção apresenta paradas fixas e 600 graus de rotação de trava para trava. Em adição, ele é de preferência autocentralizador, apresenta uma sensação positiva no centro, e requer pequeno esforço para ser dirigido.