Eletrônica Básica para Mecatrônica
Mecatrônica
1 Eletrônica Básica para Mecatrônica
INTRODUÇÃO
Há alguns anos atrás, para instalar uma máquina automatizada numa indústria era preciso contar com a ajuda de três profissionais.
Um Engenheiro Mecânico, eventualmente com especialização em pneumática, para colocar a máquina em seu lugar de funcionamento fazendo as conexões e montagens de todas suas partes; um Engenheiro Eletrônico para instalar os dispositivos de controle e finalmente um especialista em software para elaborar os programas de controle desta máquina
As coisas mudaram e hoje em dia para a mesma tarefa e também para a própria manutenção desta máquina é preciso apenas um profissional: o especialista em Mecatrônica.
Mecatrônica é a união da eletrônica com a mecânica criando automatismos, robôs, equipamentos de uso industrial e doméstico, veículos e chegando a um dos ramos mais fascinantes da tecnologia que é construção de dispositivos dotados de inteligência artificial.
No entanto, o conhecimento de Eletrônica necessário para os que pretendem se tornar profissionais desta ciência nem sempre pode ser adquirido com facilidade por publicações comuns ou mesmo adquiridos em cursos regulares.
De fato, nos tempos antigos a Eletrônica era vista como uma ciência definitiva, que era estudada para se trabalhar nela. E, neste ponto as coisas também mudaram em nossos dias: a Eletrônica é uma matéria a ser estudada para se aplicar em outras ciências como a Informática, as Telecomunicações e evidentemente a Mecatrônica.
Com estas mudanças é preciso adequar a Eletrônica à aplicação e isso é válido no nosso caso.
A finalidade aqui é justamente possibilitar a leitores de todos os níveis que desejam de alguma forma entrar no campo fascinante da Mecatrônica entender a Eletrônica básica usada em seus dispositivos
Nossa abordagem justamente será dada de uma forma que os fundamentos aqui ensinados poderão servir de base para cursos técnicos, disciplinas eletivas de cursos de segundo grau e até mesmo para o aquele que nunca teve contato com a Mecatrônica e deseja construir seus próprios dispositivos mecatrônicos.
Analisaremos o princípio de funcionamento de componentes e circuitos que podem ser usados nos projetos de Mecatrônica de todos os níveis, tanto os que podem ser elaborados com finalidades didáticas e recreativas até os que são encontrados em aplicações industriais.
Veremos todos os tipos de aplicações práticas incluindo sensores, circuitos específicos, o uso do computador e de microprocessadores e os softwares que podem ser empregados tanto em controle como sensoriamento.
Outro ponto importante de nosso curso é a abordagem de tópicos muito práticos que incluem a montagem de alguns projetos experimentais e didáticos que na sua maioria podem ser elaborados com materiais reciclados ou de fácil obtenção, inclusive os eletrônicos.
Nossa finalidade com tudo isso será:
a) Possibilitar aos leitores que pretendem estudar Mecatrônica num grau mais profundo ter os fundamentos necessários para o melhor entendimento de sua Eletrônica em especial os que tiveram uma formação na Mecânica e por isso pouco viram da Eletrônica.
b) Dar elementos para cursos de nível médio e mesmo superior para criar experimentos e aulas para seus cursos usando material prático de fácil obtenção e circuitos experimentais bastante didáticos. Até mesmo cursos completos podem ser elaborados com base no material deste curso.
c) Dar idéias práticas e fundamentos teóricos para que muitos dos leitores que já possuam habilidades no setor ou mesmo professores que pretendam implementar as partes práticas de seus cursos, possam elaborar seus próprios projetos.
d) Dar elementos e idéias para que estudantes de todos os níveis possam elaborar projetos práticos como base de trabalhos, para feiras e demonstrações ou mesmo para formaturas.
e) Reciclar os conhecimentos daqueles que já estão no campo da Mecatrônica mas que, por qualquer motivo tenham passado por uma formação incompleta no campo da Eletrônica, principalmente os que sairam das escolas há mais tempo e que portanto carecem de informações sobre componentes e tecnologias mais modernas.
f) Levar ao leitor uma imagem atual das Aplicações da Mecatrônica no dia-a-dia, indo das aplicações recreativas e didáticas até as de uso em aplicativos de consumo e industrial.
Enfim, nossa meta é fornecer aos leitores o primeiro curso fasciculado de Mecatrônica que já foi dado em qualquer publicação técnica de nosso país.
Lembramos aos leitores que nossa experiência vem do fato de também termos elaborado o primeiro Curso de Eletrônica numa revista técnica há 25 anos utilizando na época o método de “Instrução Programada”, e que foi acompanhado por milhares de leitores, muitos dos quais o utilizaram como ponto de partida para uma vida profissional de sucesso
Também elaboramos um Curso de Manutenção Eletrônica, de Rádio, TV e Vídeo e de Instrumentação na mesma revista, que nos dá a necessária habilitação para empreitar mais esta tarefa que certamente também fará sucesso entre os leitores desta nova revista.
2 OS COMPONENTES ELETRÔNICOS
Começaremos o nosso curso com a análise dos componentes eletrônicos usados nos projetos de Mecatrônica. Diferentemente do que muitos leitores possam pensar, os componentes eletrônicos básicos são todos iguais. O modo como eles são usados e as configurações é que determinam o que o circuito ou o conjunto vai fazer.
Assim, os mesmos componentes usados num robô podem ser encontrados num televisor ou no sistema de ignição eletrônica de seu carro. Podemos dividir os componentes eletrônicos em três categorias que serão o assunto desta nossa lição:
a) Componentes passivos
Os componentes passivos são aqueles que não amplificam nem geram sinais sendo basicamente usados na função de polarização, acoplamento ou desacoplamento de circuitos.
Nos projetos de Mecatrônica os principais componentes passivos que vamos encontrar são:
Resistores
Os resistores tem por finalidade apresentar uma resistência elétrica ou seja, uma oposição à passagem de uma corrente. A medida da resistência é feita numa unidade denominada ohms (W). Os resistores mais comuns são os de carbono e os de fio de nicromo ou simplesmente “de fio” e que tem os aspectos mostrados na figura 3.
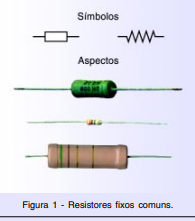
O tamanho do resistor está relacionado com sua capacidade de dissipar calor. Quanto mais intensa for a corrente num resistor mais calor ele gera e este calor precisa ser transferido ao meio ambiente. Os resistores comuns podem ser encontrados com valores de resistência desde fração de ohm até mais de 20 milhões de ohms e com dissipações de 1/8 W a mais de 100 W
Para expressar os valores altos de resistência é costume usar os prefixos quilo (k) para milhares e mega (M) para milhões. Assim, 2,2 k ohms significa 2 200 ohms e 15 M ohms significa 15 000 000 ohms.
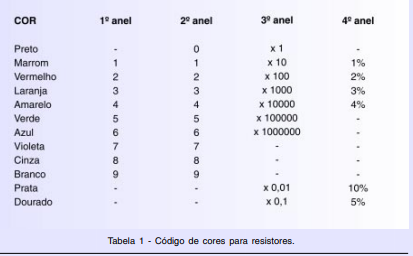
Para os leitores que vão usar resistores é importante conhecer o código de cores. As faixas coloridas em torno do resistor dão seu valor conforme mostra a tabela 1.
Para ler, o primeiro e segundo anéis a partir da ponta dão os dois dígitos da resistência enquanto que o terceiro o fator de multiplicação ou número de zeros.
Um resistor vermelho-violeta-amarelo terá 2 7 seguidos de 0000 ou 270 000 ohms (270KW).
Existem resistores especiais que podem ter sua resistência alterada e por isso são usados em ajustes ou controles. Temos dois tipos principais de resistores variáveis que são mostrados na figura 4.

Os trimpots são usados para se ajustar a resistência de um circuito girando-se um cursor sobre uma peça de grafite e os potenciômetros são usados como controles. Estes dois componentes são especificados pela sua resistência máxima. Assim, um trimpot ou um potenciômetro de 100k ohms é um componente que pode ter sua resistência ajustada para apresentar qualquer valor entre 0 e 100 000 ohms.
Existem potenciômetros especiais duplos e alguns até podem incluir uma chave para ligar e desligar um circuito.
Também podemos citar resistores especiais que podem funcionar como sensores e de que falaremos oportunamente.
Capacitores
A finalidade do capacitor é armazenar uma carga elétrica. Neste processo o capacitor apresenta algumas propriedades importantes que são aproveitadas em circuitos eletrônicos. Os capacitores são usados como filtros, como espécie de reservatório de energia ou como “amortecedores” evitando que ocorram variações grandes de corrente num circuito.
Os capacitores são especificados pela sua capacitância (ou capacidade) que é medida em farads (F). O farad é uma unidade muito grande assim encontramos na maioria dos casos especificações em submúltiplos como o microfarad (mF) que equivale à milionésima parte do farad ou 0,000 001 F; o nanofarad (nF) que equivale à bilionésima parte do Farad ou 0,000 000 001 F e o picofarad (pF) que equivale a trilionésima parte do Farad ou 0,000 000 000 001 F.
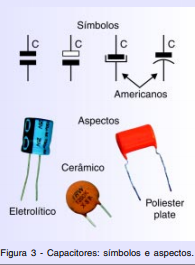
Os capacitores são formados por duas placas de metal tendo entre elas um material isolante (dielétrico) que lhes dá nome. Na figura 5 temos alguns tipos de capacitores normalmente encontrados nos circuitos de mecatrônica.
Os tipos mais comuns são os cerâmicos, poliéster e eletrolíticos. Os eletrolíticos são polarizados, ou seja, é preciso observar o pólo positivo e negativo no momento do uso.
Uma outra especificação dos capacitores é a tensão máxima que podem suportar ou tensão de trabalho que é medida em volts e que varia entre 3 V e 1200 V tipicamente.
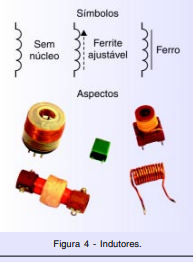
Indutores
Os indutores ou bobinas são componentes formados por espiras de fio esmaltado que podem ser enroladas numa forma sem núcleo, com núcleo de ferro ou ferrite e que tem símbolo e aspectos mostrados na figura 6.
Os indutores podem ser especificados pela indutância em Henry (e seus submúltiplos como o microhenry) ou ainda pelo número de espiras, diâmetro e comprimento da forma além do tipo de núcleo. Alguns indutores possuem núcleos ajustáveis para se poder modificar sua indutância.
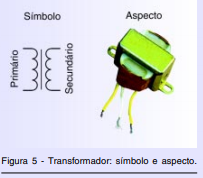
Transformadores
Os transformadores são componentes formados por duas bobinas ou enrolamentos num núcleo ou forma comum. O núcleo pode ser de lâminas de ferro ou ferrite. O símbolo e aspecto destes componentes é mostrado na figura 7.
Os transformadores são usados para alterar as característica de um sinal ou ainda uma tensão alternada. O tipo mais usado de transformador é o denominado “transformador de alimentação” ou “transformador de força”. Este tipo de transformador é usado em fontes de alimentações tanto para reduzir a tensão da rede de energia para um valor menor de acordo com a aplicação, como para isolar a rede de energia evitando assim choques em quem tocar no circuito do aparelho.
Os transformadores são especificados pela tensão de entrada (primário), tensão de saída e corrente de saída (secundário).
Diodos
Os diodos são componentes semicondutores que conduzem a corrente num único sentido. Na figura 8 temos os símbolos e aspectos dos diodos mais usados nos circuitos práticos de Mecatrônica.
Estes componentes podem ser especificados pela tensão e correntes máximas de trabalho ou ainda por um símbolo formado por letras e números dado pelo fabricante como 1N4002, 1N4148, BA315, etc.
Os diodos possuem uma faixa em seu invólucro que permite identificar seu catodo.

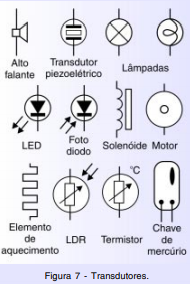
Transdutores ou sensores
Existem diversos tipos de dispositivos que podem ser usados para converter sinais elétricos em formas de energia diferentes como som, luz, etc. e dispositivos que servem como sensores. Na figura 9 temos alguns deles.
a) Alto-falantes – convertem energia elétrica em sons. São especificados pela impedância em ohms, potência em watts e pelo tamanho;
b) Transdutores piezoelétricos – são pastilhas de uma cerâmica especial que pode converter sinais elétricos em som;
c) Lâmpadas – convertem energia elétrica em luz;
d) LEDs – são tipos especiais de diodos (diodos emissores de luz) que convertem energia elétrica em luz;
e) Motores – convertem energia elétrica em movimento e força mecânica;
f) Solenóides – convertem energia elétrica em mecânica;
g) Elementos de aquecimento – convertem energia elétrica em calor;
h) Foto-resistores ou LDRs – são sensores de luz;
i) Termistores – são sensores de calor;
j) Foto-diodos – são diodos usados como sensores de luz;
k) Chaves de mercúrio – são sensores de posição.
Além desses podemos citar os sensores, que podem ser construídos com lâminas e contatos, que falaremos quando entrarmos nos circuitos que os utilizam.
b) Componentes ativos
Os componentes ativos são aqueles que podem gerar ou amplificar sinais, os quais dividimos em dois grupos principais. O primeiro, mais antigo e não muito usado atualmente a não ser em aplicações especiais são os que trabalham com base em tubos de gás ou vácuo, ou seja, válvulas e o segundo o mais moderno que trata das propriedades dos materiais semicondutores, ou seja, dos dispositivos de estado sólido.
Em nosso curso trataremos basicamente dos componentes de estado sólido que são:
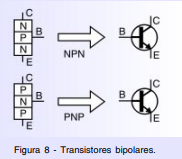
Transistores bipolares
Os transistores são componentes formados por três pedaços de materiais semicondutores como o silício P e o silício N formando a estrutura mostrada na figura 10.
Nesta figura também mostramos o símbolo usado para os dois tipos de transistores mais usados que são os do tipo NPN e PNP.
Os transistores são os componentes mais importantes dos circuitos eletrônicos, pois podem gerar e amplificar sinais além de funcionar como chaves controladas eletrônicamente.
Na figura 11 temos os aspectos de alguns transistores comuns.
No grupo (a) temos os transistores de baixa potência que são destinados a trabalhar com correntes pouco intensas. Em (b) temos os transistores de média e alta potência que são usados para controlar correntes intensas como, por exemplo, as que circulam por um motor. Estes transistores são dotados de elementos para instalação num radiador de calor, conforme mostra a figura 12.
Observe que os transistores possuem terminais de emissor (E), coletor (C) e base (B) e devem ser ligados corretamente em qualquer projeto. Os transistores são indicados, de fábrica, como BC548, 2N2222, BF494, etc.

Para usar um transistor é preciso ter em conta a tensão máxima, a corrente máxima e o ganho (fator de amplificação) que pode variar entre 5 e 10000.
Na operação normal, a corrente aplicada à base do transistor controla a corrente que circula entre o emissor e o coletor
Transistores de efeito de campo
Um tipo de transistor muito usado atualmente é o FET ou Filed Effect Transistor (Transistor de Efeito de Campo) cujos símbolos e aspectos são mostrados na figura 13.
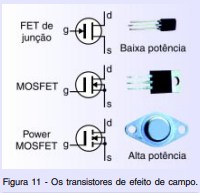
Nestes transistores a tensão aplicada à comporta (g) controla a corrente que circula entre o dreno (d) e a fonte (s).
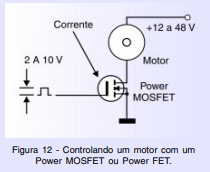
Os pequenos transistores de efeito de campo podem ser usados como amplificadores e osciladores enquanto que os maiores denominados POWER FETs ou ainda POWER MOSFETs ou transistores de efeito de campo de potência podem controlar correntes muito intensas (de até dezenas de ampères) sendo por isso muito empregado em controles de motores nos projetos de Mecatrônica.
Basta aplicar uma tensão positiva de alguns volts na comporta de um Power FET para que a resistência entre o dreno e a fonte (Rds) se reduza a uma fração de ohm e uma corrente muito intensa possa circular alimentando um circuito externo como mostra a figura 14.
Os FETs de potências são indicados por siglas como IRF6490, IRF132, etc.
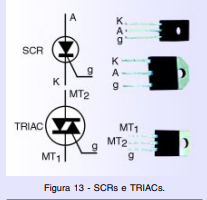
Tiristores
Os tiristores são dispositivos semicondutores destinados ao controle de correntes intensas, havendo dois tipos principais que podemos encontrar nos projetos de Mecatrônica: os SCRs (Diodos Controlados de Silício ou Silicon Controlled Rectifier) e os TRIACs cujos símbolos e aspectos são mostrados na figura 15.
Os SCRs disparam quando um pulso de tensão é aplicado na sua comporta (gate). Nos circuitos de corrente contínua os SCRs permanecem em condução mesmo depois que o pulso desaparece. Para desligá-los é preciso interromper a alimentação. Os SCRs conduzem a corrente num único sentido como os diodos
Já os TRIACs conduzem a corrente nos dois sentidos quando disparados e por isso são indicados para o controle de dispositivos em circuitos de corrente alternada.Os SCRs e TRIACs comuns podem controlar correntes que vão de 500 mA a mais de 1000 A. Os de maior corrente são dotados de recursos para montagem em dissipadores de calor.
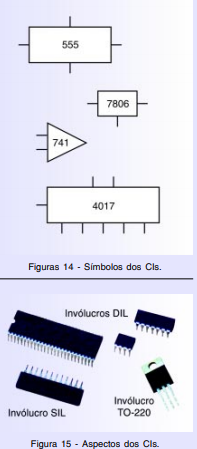
Circuitos Integrados
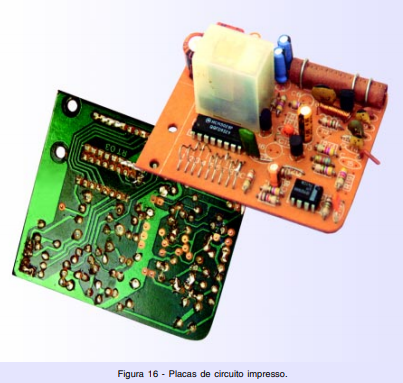
Num único invólucro podem ser encontrados conjuntos de componentes já interligados de modo a formar um circuito que exerça determinada função como, por exemplo, um amplificador, um circuito de controle, um oscilador, etc. Os dispositivos deste tipo recebem o nome de circuitos integrados e são representados por símbolos que na verdade apenas dão o seu tipo e não o circuito equivalente interno, conforme mostra a figura 16.
O uso de circuitos integrados simplifica o projeto já que alguns tipos podem conter centenas de transistores, resistores e outros componentes já interligados e prontos para uso necessitando apenas poucos componentes adicionais externos.
Na figura 17 temos os aspectos mais comuns dos circuitos integrados que podemos encontrar nos trabalhos de Mecatrônica.
Alguns circuitos integrados que se destinam ao controle de altas correntes, por gerarem bastante calor ao funcionar, são dotados de recursos para a montagem em radiadores de calor.
Os circuitos integrados são especificados por grupos de letras e números como, por exemplo, LM555, CA3140, 4017, NE567, etc. Nas listas de materiais dos projetos, é comum acrescentar-se a função do circuito integrado como, por exemplo, timer (temporizador), circuito lógico (CMOS ou TTL), regulador de tensão, etc.
Os microprocessadores e os microcontroladores são um tipo especial de circuito integrado que se destinam ao controle e processamento de informações na forma digital. Alguns microprocessadores podem conter mais de 5 milhões de transistores em seu interior.
c) Acessórios
Os acessórios são partes de um projeto que não fazem propriamente parte dos circuitos, mas que são importantes. Estes componentes sustentam partes de circuito ou fazem sua conexão. Temos os seguintes exemplos:
Placas de circuito impresso
Os componentes eletrônicos são montados e soldados em placas de materiais isolantes onde existem gravadas trilhas de cobre que funcionam como os fios de ligação entre estes componentes. Elas são denominadas placas de circuito impresso. Na figura 18 temos um exemplo de placa.
O padrão ou desenho das trilhas de cobre de uma placa depende do circuito que vai ser montado. Assim, para as fábricas o que se tem é um projeto e uma produção em massa para a placa que vai suportar o circuito determinado em fabricação. Para a montagem de um protótipo, como ocorre num laboratório de Mecatrônica ou por um amador, por exemplo, a placa deve ser projetada e manufaturada individualmente.
O projeto pode ser feito manualmente ou por meio de programas como o MultiSIM da Electronics Workbench que simula o circuito e desenha sua placa. As placas são então gravadas e corroídas utilizando-se kits que contém as substâncias necessárias a isso.

Outra possibilidade para o projeto e montagem de protótipos é a utilização de matrizes de contactos e placas universais como as mostradas na figura 19
Na matriz de contatos os componentes são encaixados sem a necessidade de solda e interligados com pedaços de fios. A troca de configurações é simples e uma vez verificado o seu funcionamento pode-se partir para uma montagem definitiva. Uma placa com o mesmo padrão permite transferir diretamente o projeto para uma versão definitiva com componentes soldados.
Outros elementos acessórios são mostrados na figura 20 e são de grande utilidade tais como:
- Suporte de pilhas;
- Botões de controle;
- Suportes de fusíveis;
- Tomadas e conectores;
- Interruptores e chaves;
- Cabos de ligação;
- Caixas para montagem;
- Soquetes para circuitos integrados;
- Radiadores de calor;
- Bornes e garras jacaré.
Ao tratar dos projetos práticos será comum agregarmos às listas de materiais alguns dos elementos acessórios.
3 CONCLUSÃO
O que vimos nesta nossa primeira lição foi apenas uma visão geral dos componentes eletrônicos usados nos projetos de Mecatrônica.
Para um aprofundamento maior nestes componentes e no seu uso sugerimos que os leitores leiam o “Curso Básico de Eletrônica” de Newton C. Braga que traz todos os elementos para que se trabalhe com circuitos e componentes de uma forma mais profunda.
Neste livro também são dadas as técnicas de montagem com o uso do soldador que é a ferramenta básica para este tipo de trabalho.
4 PARTE PRÁTICA
Na nossa primeira lição não podemos partir para projetos completos de imediato. Assim, nosso primeiro circuito eletrônico será bastante simples para que os leitores tenham contato com as tecnologias e componentes que serão comuns daqui para frente. Montaremos três circuitos bastante simples:
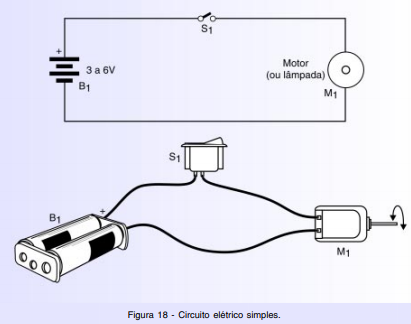
a) Circuito Elétrico Simples
Um circuito elétrico simples é formado por uma fonte de energia (bateria) um dispositivo de controle (interruptor) e uma carga (que é dispositivo que deve ser alimentado pela bateria).
Como primeiro projeto podemos mostrar o modo de se alimentar uma lâmpada ou um motor usando pilhas conforme mostra a figura 20.
Neste projeto o número de pilhas ligadas em série é determinado pela tensão que o motor ou lâmpada precisa para funcionar. Assim, levando em conta que cada pilha fornece 1,5 V, temos de usar 2 pilhas se a lâmpada ou motor for de 3 V e 4 pilhas se for de 6 V.
O tamanho das pilhas, se pequenas (AA), médias ( C ) ou grandes (D) depende do consumo ou potência do motor. Normalmente, nas aplicações em que o motor tem de fazer força devem ser usadas pilhas médias ou grandes.
Um fato importante que deve ser observado neste primeiro experimento que o leitor pode fazer é que o sentido de rotação do motor depende da polaridade das pilhas. Invertendo as pilhas o motor inverte a rotação. Na figura 21 mostramos um projeto simples baseado neste circuito que é um “aerobarco” movido à pilhas. Basta acoplar uma hélice ao eixo do motor e com a escolha do sentido apropriado da corrente no motor fazemos com que ela propulsione o pequeno barco que pode ser até uma simples prancha de madeira que flutue com as pilhas e motor.
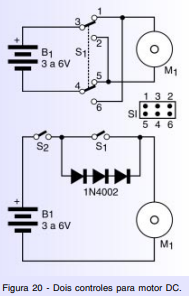
b) Controlando um Motor
Se o sentido de rotação de um motor de corrente contínua depende do sentido de circulação da corrente ou polaridade das pilhas, a força que ele faz também pode ser controlada com a ajuda de componentes como diodos ou resistores.
Na figura 22 mostramos como podemos controlar o sentido de rotação de um motor com uma chave reversível (HH) e a velocidade com três diodos 1N4002.
O motor usado pode ser aproveitado de qualquer brinquedo eletrônico ou mesmo adquirido separadamente devendo apenas o leitor observar qual é a sua tensão nominal de alimentação.
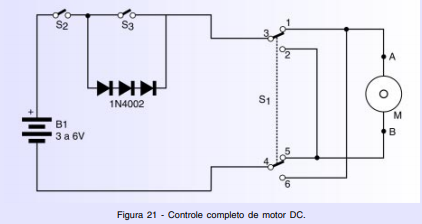
Os dois circuitos podem ser associados num único conforme mostra a figura 23.
A chave S1 faz com que o motor gire num sentido e noutro, a chave S2 liga e desliga o motor e a chave S3 muda sua velocidade. Quando a chave está aberta os diodos reduzem a tensão aplicada ao motor. Cada diodo de silício pode reduzir em 0,7 V a tensão. Quando a chave está fechada o motor recebe a alimentação total e roda com máxima velocidade (e potência)
Podemos usar dois diodos para reduzir em 1,4 V a tensão ou três diodos para reduzir em 2,1 V.
Uma aplicação interessante num projeto de Mecatrônica para este circuito é o elevador mostrado na figura 24 em que temos um controle sobedesce pela inversão do motor, e de força conforme o peso que ele tem de manusear
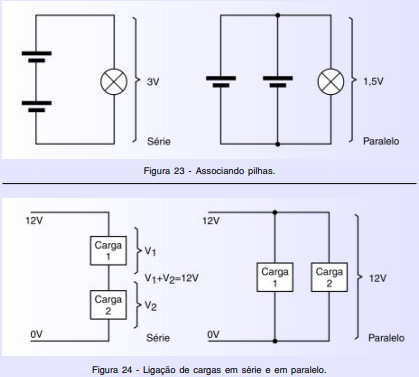
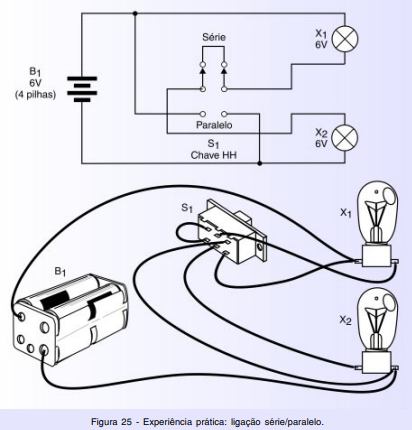
c) Ligação Série e Paralelo
Motores e outras cargas além de fontes de energia podem ser ligados em série ou em paralelo.
Quando ligamos pilhas em série as suas tensões se somam, e quando ligamos em paralelo aumentamos sua capacidade de fornecimento de corrente mas a tensão se mantém conforme mostra a figura 25.
Podemos mostrar o que acontece com as tensões na prática usando duas lâmpadas de 6 V x 50 mA e quatro pilhas comuns no experimento da figura 27. Quando as pilhas estão em paralelo a tensão em ambas é 6 V e elas acendem com máximo brilho. Quando são ligadas em série cada uma recebe apenas 3 V e elas acendem com brilho reduzido